微夹钳国内外研究现状
时间:2018-04-07 09:05 来源:毕业论文 作者:毕业论文 点击:次
| 20世纪60年代发展起来的微电子技术获得了巨大成功,这带来了微纳米技术革命 [1-3]。微纳米技术是一个新兴的,涉及电子机械、材料、物理、化学等多学科的高技术领域。它所研究的和控制物质结构的功能尺寸或分辨能力,达到了微米甚至纳米尺度,为此,就要求有进入亚微米甚至纳米精度的相应的工艺装备的定位精度,而微机械零件的加工往往需要一种操作尺寸十分细微的由微动系统装配成的微机械,该微机械即微夹持或微操作系统,其中微夹钳技术是此微系统的关键。作为一种典型的微执行机构的微夹钳,不仅可成为微机器人的手爪,而且在微机械零件的加工、装配、生物工程和光学等领域均有很好的应用前景[4]。因此,微夹钳及与其相关的研究已作为微机械研究领域的一个前沿课题受到国内外的广泛关注。20681 目前, 国内外对微夹钳的研究成果多种多样,而根据直接决定微夹钳主体结构尺寸和性能的能量供给和驱动方式划分,可以将微夹钳大致分为以下几种: (1)静电式微电钳[5]。静电驱动微电钳的夹持力是由梳齿状或叉齿状平行电容产生的侧向静电力吸引力。当微夹钳通直流电时,平板电容器的侧向吸引力使钳口夹持物体;当微电容器放电夹持力消失后,夹钳靠侧壁的弹力恢复到原来位置,从而是钳口张开,松开夹持物体。静电驱动微夹钳的优点是轻易实现小型化和轻型化以及制作工艺和IC工艺兼容,缺点是难以实现大的位移和力的输出。论文网 (2)电磁式微电钳[6]。利用斜楔推动夹爪完成夹持任务,驱动源为电磁力。优点有能获得较大范围的开口张合量;夹持动作相应快、无磨损、控制简单、精度高、承载能力大,但其体积大。缺点是:无法做的很小,还称不上微夹钳。 (3)压电式微夹钳[7]。驱动源是压电变换器。通过施加电压,使压电变换器产生长度变化,从而使钳口张合。此微电钳具有输出可控、无摩擦、无间隙、易制作等优点,但总体尺寸受压电元件限制,难以做的很小。并且压电元件的逆压电效应产生的变形量很小,一般采用机械增幅结构。 (4)形状记忆合金微夹钳[8]。挟持和释放物体是通过利用形状记忆合金的记忆效应,此类微夹钳具有较高的机械性能,同时抗腐蚀性好,可恢复应变量大,恢复力大,本身既是驱动材料又是结构材料,容易实现小型化和简易化。 (5)液体吸附式微夹钳[9]。此类微夹钳用于对易损元件进行夹持,其原理是利用低粘度液体抓取,图1-1是一种液体吸附微夹钳,附着液为酒精,钳臂末端的附着液与微器件接触,微器件在粘附力的作用被吸起。液体吸附式微夹钳的优点是特别适于易损元件,缺点是夹钳体积大,不易小型化,且易引起微器件间的粘附等。 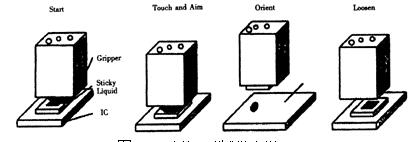 图1-1 液体吸附式微夹钳 (6)光捕获微夹钳(光钳)[6]。光钳的原理是通过光捕获技术来移动夹持微小物体,光捕获技术就是利用光的力学作用,用激光束夹持不足微米大小的物体,并使之移动的技术。目前, 主要在生物学等相关的领域才用到光钳。 前述几种微夹钳中,通过静电驱动、电磁驱动、压电驱动、形状记忆合金驱动、电热驱动的均需电磁激发装置以及连接导线,易引起和受到电磁噪声的干扰,从而对微夹钳及其周边微装置带来扰动,甚至会造成被夹持物体的损坏。而液体吸附式微夹钳不易小型化,且易引起微器件间的粘附。而光光捕获微夹钳主要用于与生物学相关的领域的纳米级物体的移动,适用性不够广泛。 (责任编辑:qin) |