立体匹配算法国内外研究现状
时间:2018-04-19 21:16 来源:毕业论文 作者:毕业论文 点击:次
二十世纪七十年代,马尔和波及奥等人,通过计算机视觉处理过程的研究,提出了一套视觉计算理论,成为计算机立体视觉匹配研究的开端。[4]八十年代,Barnard等人在对前人的立体匹配研究进行总结时,提出了立体匹配的步骤、方法以及评估标准,并对当时较为流行的几种方法进行了评估,将计算机立体视觉概括为优尔个步骤[5] [6] [7],如图1.1所示: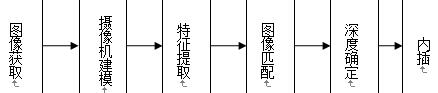 图1.1 Barnard关于立体视觉的优尔个步骤 由于巴纳德的理论提出时间较早且较为系统,极大的影响了后来人们对立体匹配的研究。[8]在巴纳德理论的基础上,当时的研究者们取得了一些研究结果,首次引入了层次处理的观念以及三目约束的思想,同时也提出了各种新的匹配方法。21445 到二十世纪九十年代,为了满足一些实际需要,许多研究者开始研究如何在某些特定场景中具体地应用视差计算方法。现在的许多立体匹配算法研究都是在那时出现,并随着不断研究改进逐步发展到今天的。论文网 2002年,Scharstein和Szeliski将整理归纳了此前的立体匹配方法,并将当时已有的算法划分成两类:局部立体匹配算法和全局立体匹配算法;此外他们还建立了可以提供一系列权威的测试数据库以及量化误差的算法评测平台的网站,目前的很多算法研究都是利用这个网站进行验证的。[9] [10] 当前匹配精度比较好的立体匹配算法主要是基于图像分割的全局立体匹配算法,这种算法把局部立体匹配和全局立体匹配有机的结合在一起,利用一个视差平面模型对每个分块进行描述,很大程度上提高了匹配结果的精确度。 目前国内的研究现状是在基于特征的选择以及在匹配的相似度度量上进行研究,同时也针对遮挡问题和弱纹理问题进行了讨论,而针对倾斜平面的问题国内的研究相对较少。微软研究院的孙健在全局立体匹配算法和遮挡问题、弱纹理问题方面做了非常深入的研究;浙江大学利用双目立体视觉原理,对动态的机械装置系统进行位置的精确定位和检测;香港大学马克西姆博士和龙泉教授提出的基于图像区域分割的区域增长算法,匹配效果明显。[11][12] 而目前国际上主要采用的是基于颜色这一特征进行分割的全局匹配。耶鲁大学的Gang Li在解决倾斜平面和曲面的立体匹配的问题时,提出了几何特性进行视差估计的方法;意大利的路易吉斯蒂法诺等人在博洛尼亚大学提出了一个单向匹配算法;美国的T.Kanade在卡内基梅隆大学提出了自适应窗体的匹配方法;微软与华盛顿大学合作的火星卫星“探测者”号上采用的导航定位系统,则利用的是非线性推理优化方法对两幅图像进行匹配计算。 所以,立体匹配技术是目前计算机立体视觉中既困难又相当具有挑战性的课题,计算机立体视觉系统的性能很大程度上受到匹配精确度和速度影响。因此,国内外的各大研究机构都广泛的研究立体匹配技术,得到了许多开创性的研究结果。 (责任编辑:qin) |