基于视觉的目标追踪与检测系统设计与实现(3)
时间:2018-09-11 10:51 来源:毕业论文 作者:毕业论文 点击:次
1.2.2动态背景情形下的目标追踪方法 在云台控制下,摄像头可以在多个自由度下旋转,是的采集图像的视野不断的变化,因此,对于整个目标追踪的过程来说,背景是不断变化的,同时目标也在不停地运动,这种情形相比于静态目标有较大的难度。跟踪过程中,摄像设备会在不同角度下获取若干不同的背景图片,将这些背景收集并建立背景图片库。在检测目标时根据当前帧图像在图片库中进行检索,与之相匹配的图像,让后再根据相应算法获取目标并完成相应的操作。 1.3 现状分析 2运动目标检测技术 2.1 帧差方法 2.1.1帧差方法基本思想 帧差方法又叫做时间差分法。由于运动图像序列的相邻帧之间具有较强的相关性,因此可以根据这种相关性来实现这种检测算法[ ]。其基本思想是:将相邻的两帧或者多帧连续图像按每个像素相减,达到去除静止的背景或者运动缓慢而不需要检测的物体,进而获得差值图像,二值化后再根据预定的阀值来判断某个像素点是否位于运动图像上。(见公式2-0)经过该操作后的图像可以显示所检测目标的几何形态、空间状态及运动状态,从而实现了对运动目标的检测这个目的,这是消除静止背景,获取运动物体轨迹最直接的方式。除了简单的逐像素相减,改进的帧差算法还可以由两组相邻帧像素的均值相减所得。D_k (x,y)=〖|f〗_k (x,y)-f_(k-1) (x,y)|; R_k (x,y)={█(1 〖 D〗_k (x,y)>T@ 0 else )┤ 2.1.2帧差方法算法实现 公式中D_k(x,y)表示第k帧图像f_k(x,y)与前一帧对应像素灰度的差分值,再将其与给定的阀值T进行比较,如果图像中该像素的值大于阀值,就判断其在运动目标上,其相应的像素就取1,反之则判断该像素不在目标上,令其值为0。这样就由差分图像D_k(x,y)二值化获得图像R_k(x,y)。最后根据R_k(x,y)图像的连通区域判断运动目标所处的区域。具体流程如图2-1所示。 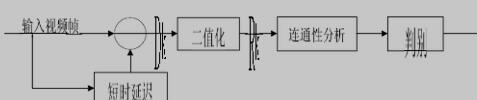 图(2-1)帧差法流程 2.1.3帧差方法评价 帧差分法利用相邻帧的操作来实现目标的检测,计算较为简单,算法复杂度较低且具有较好的实时性,不易受环境光照变化的影响,对阴影也有较强的适应性,可用于快速准确的定位运动目标,对实时性要求较高的系统常采用此种算法。但是,这种算法无法检测静止目标,而且处理效果受图像采样频率和物体运动速度影响较大。例如物体运动较快而是平的采样频率较小时,可能会造成误分割;反之,当运动物体速度较慢而采样频率较大时,则会造成过度覆盖,甚至可能会造成运动物体完全覆盖。 总之,在背景固定的情况下,帧差法的场景变化适应性较强,快速、稳定。但是总体而言,帧差法对于图像的相关特征像素点的提取是不完全的,检测的背景也并不是实际中真正的背景图像,这就使得检测的精确性稍显欠缺,这对于进一步的识别追踪较为不利。 2.2运动场估计法 2.2.1 运动场估计法基本思想 运动场估计法是通过分析视屏序列的时空相关性来分析估计运动场,在相邻的帧之间建立关系,最终利用背景与目标的运动状态的差异来实现对运动目标的额检测分割[ ]。运动场估计法中主要使用的是光流法,本章将详细介绍光流法的内容。光流是描述了物体运动的速度场,主要工作是建立两帧灰度值和运动场之间的联系[ ]。光流法检测目标运动时随时间变化的特性,当物体进行运动时,在图像上所对应的亮度模式也会进行运动,。在光流场中由于物体运动的速度不同,而面积较大的背景运动会在图像上产生均匀的速度矢量区域,这使得实现对于不同运动速度运动目标的检测易于实现。 (责任编辑:qin) |