
2 喷漆机器人总体方案设计
2.1 喷漆机器人的基本技术参数确定
喷漆机器人的基本技术参数主要包括坐标形式、自由度、运动范围、有效负荷、驱动方式和传动方式。
2.1.1坐标形式的选择
常见的工业机器人根据手臂的动作形态,按照臂部关节沿坐标轴的运动形式,其类型大致可以分为以下5种: (1)直角坐标型机器人;(2)圆柱坐标型机器人; (3)球坐标(极坐标)型机器人; (4)SCARA型机器人;(5)关节坐标型机器人。
(1)直角坐标型喷涂机器人如下图2-1(a)所示,机器人的主体结构的关节是移动关节,其末端空间位置的改变通过沿三个相互垂直轴线的移动来实现,这种形式的喷漆机器人具有结构简单,刚度高,关节之间运动相互独立,没有耦合作用。但结构占地面积较大,动作范围小,灵活性差,且导轨面防护比较困难。
(2)圆柱坐标型喷涂机器人如图2-1(b)的回转型喷涂机器人,圆柱坐标式机器人主体结构具有三个自由度:腰转、升降和伸缩。这种喷涂机器人,占地面积小而活动范围较大,结构简单紧凑,并能达到较高的定位精度,因而通用性较强。但是这种喷漆机器人的结构庞大,并且受结构限制,手臂不能抵达底部,减少了一定的工作范围。
(3)球坐标型机器人如图2-1(c)的俯仰型喷涂机器人,这种机器人的主体结构具有三个自由度,即为两个旋转运动和一个直线运动,其手臂机构可以沿X方向进行伸缩,围绕Y轴和Z轴进行回转运动。这类喷涂机器人具有占地面积小、工作范围较大、结构紧凑、重量较轻、位置精度尚可等特点,能与其他机器人协调工作,但存在着平衡问题,且控制系统较为复杂。
(4)SCARA机器人如图2-1(e)所示,一共包含有三个可旋转的关节,其中关节的轴线互相平行,可以在平面内进行定位和定向运动。另一个是移动关节,这种结构轻便、响应快。但是这种机器人只适用于平面定位和在垂直方向进行工作的场合。
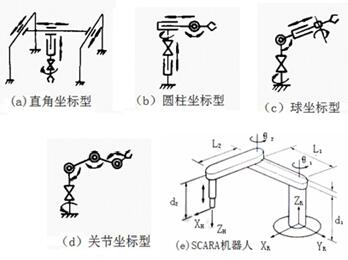
图2-1 工业机器人的五种坐标形式
(5)关节坐标型喷涂机器人如图2-1(d)所示,是目前应用最多的一种结构形式,主要由机身、大臂和小臂组成。机器人的运动由大、小臂的俯仰及机身的回转构成,所有关节均为转动关节,其结构最紧凑,动作灵活,占地面积小,工作空间大,能与其他机器人协调工作,并且运动部位密封性好,但是存在平衡以及控制耦合的问题,且运动学复杂,不太便于控制。
为适应不同生产工艺的需要同一种运动形式可采用不同的结构,本此喷漆机器人设计采用如上图2-1(d)所示的关节型机器人,其特点是结构紧凑、所占空间体积小,工作空间大,能够满足对复杂的自由曲面的喷漆,满足这次喷漆机器人的设计任务要求。
2.1.2自由度
喷漆机器人的自由度是指喷漆机器人所包含的相互独立的坐标轴的运动数目,但是一般情况下,机器手负载端的自由度是不包含在内的。自由度表示了机器人整体运行的灵活程度,喷漆机器人空间位置和运行姿态在三文空间中总共需要优尔个自由度来进行确定。
为了满足特定的工艺需要,专用的机械手一般只要求有2-3个自由度,而工业机器人必须具有4-6个自由度才能满足不同产品的不同的工艺要求[16]。喷涂机器人的自由度越多,其运动能力就越类似于人手,这也表示机器人的通用性更好,相对的其机械结构也会更加复杂,另外自由度的增加也意着其整体结构重量的增加。所以运动形式的选择,在符合规定的要求下,一般以自由度最少,结构最为简单为最优。 自动喷漆机器人机身系统设计(4):http://www.youerw.com/jixie/lunwen_19114.html