
第五章是实验验证部分,在硬件和软件设计好的基础上进行试验来验证整个系统的实用性,对试验结果进行详细深入的分析,给出一些影响测量精度的因素。
最后是结论部分,对整个系统的性能进行了一个总结,指出其预期功能的实现情况以及所存在的不足,对系统以后的改进做出展望。
2 系统总体设计
2.1 GPS测姿原理
2.1.1 大地坐标与地心坐标的变换
由于本课题所用的GPS模块所采集到的信息是由大地经纬度坐标(纬度,经度)来表示的,所以我们处理数据的时候首先应该将其化为地心直角坐标系X、Y、Z表示。其中,以地心作为大地直角坐标系的远点;Z轴为极轴,向北为正;X轴穿过本初子午线和赤道的交点;Y轴穿过赤道与东经90°的交点 。如图2.1所示。
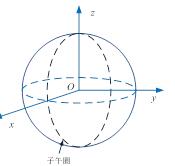
图2.1 大地坐标系
虚线部分为子午圈。
假设地球为一个球体,半径为r,约等于6370.8560km。读取的纬度为φ,经度为λ,则:
(2.1)
(2.2)
(2.3)
2.1.2 双天线GPS测姿原理
双天线分别测出接收机1、2的经纬度信息,将其用公式(2.1)、(2.2)、(2.3)换算成直角坐标,分别为 、 。则其差值向量为 ,即基线矢量,通过公式(2.4)、(2.5)即可解算出设备的方位角α和纵摇角β。从而得到载体的姿态信息。
(2.4)
(2.5)
2.2 系统总体设计
整个系统按功能来可以大致分为三个模块:数据采集模块,数据处理模块和数据输出模块。数据采集模块主要包括两个ublox公司的NEO-6T GPS芯片,和两个GPS天线,通过串口和处理器连接,用于读取GPS模块的经纬度。数据处理模块的核心是ST公司的STM32F103RCT6单片机,主要用来对前端采集到的数据进行处理,根据测姿原理进行坐标变换,最终得到载体与直角坐标系三个平面的角度。数据输出模块选用CH340T USB转串口芯片,实现程序的下载与单片机和PC机的通信,输出所需要的数据 基于GNSS载体的姿态测量系统设计(3):http://www.youerw.com/jixie/lunwen_19482.html