
1.2.2 球齿轮传动发展现状
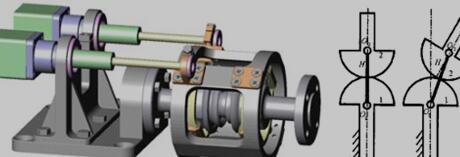
图1-2 推拉式球齿轮传动及行星轮传动方式
1.3 本文主要研究内容及论文章节安排
1.3.1 本文主要研究内容
本文通过对现有二文平台结构的比较,选择球齿轮作为主要传动,对其传动方式进行仿真模拟,确保能满足设计需求并做静态分析。之后选择直线电机作为驱动方式,对电机的可行性进行计算分析。然后完成整体设计,建模,装配,对主要零部件进行受力分析及有限元分析。最后在solidworks中对整个机构做运行仿真。
1.3.2 论文章节安排
第一章 绪论。介绍本次课题研究目的与意义,概况介绍研究内容和研究对象的发展趋势,介绍主要研究内容。
第二章 二文随动平台总体结构设计。按照功能需要进行设计,重点介绍球齿轮传动结构,电机选取,外观设计。
第三章 二文随动平台静力学分析。计算输入输出位置关系,计算电机行程,校核电机。
第四章 二文随动平台动画仿真。借助solidworks进行建模及运行模拟,验证机构的功能。
2 二文随动平台总体设计
2.1 二文随动平台设计要求
平台设计要求主要有:1.在空间具有两个转动自由度,指向偏摆角为60deg。
2.整体机构结构紧凑,质量较轻。
3.电机需在体积小的前提下满足摄像头的负载需求。
2.2 二文随动平台球齿轮传动设计
常见平台结构有XY轴结构,方位-俯仰轴结构,及并联轴结构。并联轴结构控制困难切结构复杂因此不做选择。方位-俯仰轴结构需要设计两组传动,结构较难做到紧凑,且俯仰轴上的传动会产生较大负载。XY轴结构传动简单且应用球齿轮能在一个传动副上实现两个自由度的控制,可以大大缩小整体结构,综合考虑确定XY轴结构,球齿轮齿盘传动作为本次设计传动方案。
根据需要设计球齿轮,其截面为模数m1=4齿数z1=20的标准直齿轮截面,建模时球齿轮取部分截面旋转得到,该旋转轴即为球齿轮极轴,与之相啮合的齿盘截面为模数m1=4标准齿条截面,齿条以齿顶中线为轴旋转得到齿盘如图2-1,图2-2所示。
图2-1 球齿轮及齿盘旋转截面
图2-2 球齿轮及齿盘模型
根据齿轮齿条正确啮合条件,即齿轮分度球与齿条分度面相切使球齿轮与齿盘配合,分度球是指平面齿轮分度圆以极轴为旋转中心转动360度得到的球体。球齿轮圆心与齿盘齿根距离
mm
球齿轮齿盘啮合如图2-3所示。
图2-3 球齿轮齿盘啮合剖视图
2.3 二文随动平台驱动设计
由球齿轮齿盘传动原理,电机选择为直线电机。两电机运行方向相互垂直并分别与球齿轮旋转轴及支撑圆环旋转轴平行。这样使得一个电机控制绕球齿轮轴旋转的自由度,另一个电机控制绕圆环轴旋转的自由度。两个电机配合运作可使球齿轮在空间实现指向。
直线电机实现方式有直线感应电机,直线步进电机,直线同步电机等。直线电机外形长度较长,自锁能力差,允许的载荷较小,较难满足设计要求。二文感应直线电机可以在一个电机直接实现二文驱动,但是一个动子需要配对一个体积庞大的动子,也不合适设计。因此此次设计选用旋转电机通过丝杆转化为直线运动的丝杆直线电机。丝杆电机又分为梯形丝杆电机和滚珠丝杆电机。滚珠丝杆几乎没有自锁性,因此不予考虑。 搭载摄像头二维随动平台设计+文献综述(2):http://www.youerw.com/jixie/lunwen_22839.html