
2.6箱体结构的设计18
2.7轴承的计算和校核 19
2.7.1 轴承的选择 19
2.7.2 轴承的校核 19
2.8联轴器的概述 21
2.8.1联轴器的功能.21
2.8.2联轴器的类型.21
2.9 联轴器的选择 21
2.9.1 联轴器类型的选择 22
2.9.2 联轴器型号的选择 22
2.10 带轮的选择.23
第三章 三维模型的建立 25
3.1 整体视图 25
3.2 轮部视图 26
3.3 腿部视图 27
第四章 控制系统及传感器 29
4.1 控制系统要求 29
4.2 超声波传感器要求 30
总结 32
致谢 33
参考文献 34
第一章 绪论
1.1 国外研究综述
1) 美国好奇号火星车
美国航空航天局的好奇号(Curiosity)火星探测器,如图1.1所示,它是美国即勇气号之后的第四个火星探测器。火星探测器好奇号是一个汽车大小的遥控装置,并首次使用核电流动站驱动器,其任务是探索生命在火星上的元素。在23:02于2011 年11 月 26日的好奇号火星探测器成功发射成功进入轨道到火星。并在2012 年8 月 6日成功登陆火星表面,进行了两次火星任务。好奇号代表了世界上,最先进的机器人技术。其六个轮子每个具有一个独立的驱动马达,其配备有两个前部,两个后轮转向马达,好奇号可以旋转围绕360°,好奇号使用操纵杆的转向悬挂系统的移动机构,该系统,使障碍物高度的检测,加倍和保证检测器倾覆45°,在任何方向不反转的危险,但在软件设计推翻机器人安全的极限,流动站被设定为30°。好奇号火星探测器同时还利用其自己的由不同的检测器和摄像机进行,进行一系列的科学任务到火星的表面分析,并且可以具体地定制火星表面材料组合物的分析,具有强大的多任务处理功能。
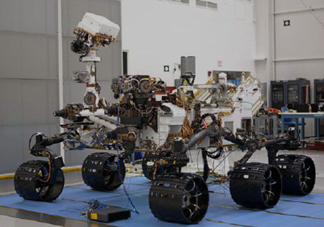
图 1.1 好奇号(Curiosity)火星探测器
2)美国L六轮足式移动机器人
美国喷气推进实验室(L),是研制六轮的火星探测车的领头羊,已成功开发出一系列的rock流动站,包括sojourner(图1.2)的领导者,包括后来漫游者(mars rover)机器人(图1.3)。其中sojourner于1997年 7月 4日登陆火星,是人类第一次火星车单位。月球车是一个小型自主机器人车辆,可从地面进行遥控。该机器人使用六个摇臂悬挂的结构,它有六个驱动轮独立悬挂,传动比为2000 :1,可在各种复杂地形的旅行,特别是在柔软的沙滩上。除了与独立车轮驱动和控制能力的机器人的四个角。该机器人在某种程度上,属于最真的六足式移动机器人。 2004 年美国东部时间1 月 3日和 24日,分别在火星上登陆两辆探测车,这就是知名的,勇气号和机遇号。喷气推进实验室的火星车,美国作出的最先进的火星车。机器人装配了,目前为止最先进的设备,目前来讲还拥有最先进的移动性,强大的障碍的能力,原地转弯 360°的能力。除了其先进的移动性能,安装在探路者包括各种立体摄像机,红外光谱仪,显微镜,光谱仪(用于确定岩石组合物),APXS(ALPHA射线)系统,RAT(Rock AbrasionToof)系统和其他的先进的仪器来检测环境,岩石和土壤被分析和观察。到目前为止,勇气号和机遇号,仍在努力工作于火星上。 Solidworks六轮足式移动机器人设计+CAD图纸(2):http://www.youerw.com/jixie/lunwen_42975.html