- 上一篇:基于MEMS传感器网络的帕金森病姿态监测和评估系统设计
- 下一篇:51单片机的4层电梯控制系统设计+电路图+源程序
1.3.3 管理软件功能
1)系统通讯
通讯模式根据硬件具体选型采用以太网或总线形式,确定PLC和PC计算机的通信协议和相关的软硬件设置;
2)系统控制及运动相关参数设置
参照挖掘机的五种工作模式的特点,通过参数设置,调用相关数学模型计算控制参数及控制目标;
3)系统工作参数实时显示
基于PLC与PC计算机的通讯模式和通信协议,PLC将系统工作时的位置信息、速度信息、角度信息以及相关电气设备的控制及状态参数信息写入共享内存,由PC计算机读取并显示;
4)系统运行轨迹的记录、分析及回放
基于PLC与PC计算机的通讯模式和通信协议,PLC将系统运行轨迹信息写入共享内存;PC计算机读取信息并按约定格式写入数据库或文件存储,并以动画形式在界面上复现系统运行情况。
1.4 设计原则
本系统的PLC软件开发采用西门子Step7的语句表进行。西门子Step7的语句表(Statement Language)语言在编程功能上具备了子模块调用、内存分配,中断或异常处理的较为高级的功能,也具备了梯形图编程语言、所不具备的基址变址寻址方式,而这个寻址方式是结构化编程和模块复用的关键!另外语句表在子功能模块(或子过程)的调用,变量名的引用等很多方面也比梯形图更加灵活和方便。更为重要的是,语句表能使结构化编程方法和面向对象编程方法在PLC编程中得以顺利实施。特别是本项目中控制挖掘机大臂、小臂和铣挖机头运动行程时,需要用到PID软件模块,采用语句表编程,更为灵活可靠,调试参数时方便快捷。可以用梯形图及功能块的尽量使用,方便现场文修[10]- [13]。
2 系统结构图及硬件配置详情
2.1 硬件配置
本系统选用的下位机可编程序控制器(PLC)为西门子(SIEMENS)公司的S7系列。为了提高控制系统的可靠性,上位机推荐为双机双缆热备冗余(两台主机显示三个画面),下位机推荐为双机双缆半热备冗余。两台上位机互为备用、并列工作。PLC主机CPU与上位机之间通过PROFIBUS或者PROFINET网络通讯。系统中,CPU主站接受外部两路独立的220VAC电源,当一路电源失去时,另一路电源能自动投入。其他系统IO配置则根据实际信号点以及控制量具体推算[14]- [16]。
2.2 系统结构
系统软件的概要结构图如图2.1所示。
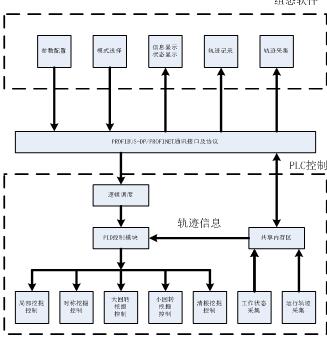
图2.1 挖掘机软件结构图
3 控制系统设计
3.1 通讯网络控制设计
本系统通讯任务复杂,环境干扰较大,对网络系统的传输速度,抗干扰能力有一定要求,因此本系统采用Profibus-DP 网络,即用西门子S7 系列PLC 搭建整个系统,采用Profibus-DP总线传输。
3.2 主站系统控制设计
主站采用西门子 S7-300PLC,CPU 集成MPI+ DP 连接器口,支持Profibus-DP 总线通讯功能。I/O 模块接收来自操作屏的启/停命令并指示各系统的运行状态。
操作显示屏有操作屏操作、HMI(人机界面)操作两种方式可选,并且在系统运行时可以在这两种操作中切换。操作屏操作有手动/自动两种工作方式,手动时可以完成对单个系统的单独远程控制,自动时则可以使挖掘机系统中的相关系统按一定的顺序进行挖掘。HMI 工作画面上显示各系统的运行状态及故障处理、辅助操作等等。主站负责主控制室对所有系统的远程操作和对整个系统的监视管理。
-
OpenGL+Stewart六自由度船舶模...
-
稀土永磁风力发电机控制系统设计+流程图
-
PLC双馈式风电系统转矩控制系统设计+梯形图
-
stc15单片机水温水压无线监...
-
DSP高精度离线数据采集系统设计
-
PLC加热炉温度监控系统设计
-
PLC变压器升降平台控制系统设计+梯形图
上市公司股权结构对经营绩效的影响研究
巴金《激流三部曲》高觉新的悲剧命运
中国传统元素在游戏角色...
浅析中国古代宗法制度
C++最短路径算法研究和程序设计
NFC协议物理层的软件实现+文献综述
高警觉工作人群的元情绪...
江苏省某高中学生体质现状的调查研究
g-C3N4光催化剂的制备和光催化性能研究
现代简约美式风格在室内家装中的运用