
目前,国内外关于人体运动姿态研究有很多,其中人体上肢运动姿态研究[7]、人体脸部姿态[8]、人体姿态识别[9]等方面都属于人体运动姿态的研究。利用动作捕捉系统可以高效快速地捕捉人体运动姿态数据,利用傅里叶变换对数据进行处理,这些数据被处理后可用于机器人的相关实验研究[10]。如图1.1是介绍人体层次结构的简单示意图。34035
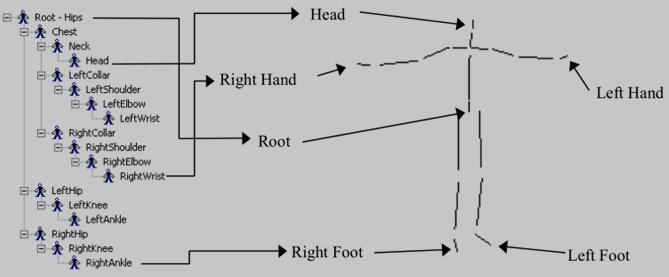
图1.1 人体的层次结构
目前动作捕捉的一个重要研究方向是人体运动姿态分析。时空参数、运动学参数、动力学参数和人体测量学参数是人体运动姿态主要参数。人体运动的时候会产生各种姿态,而从这些姿态中收集人体主要关节点的数据,利用这些数据可以展开实验研究,对整个人体的肢体运动姿态进行量和质的分析[11]。
人体运动姿态可以以静姿态和变姿态的不同分为两种类型[12]。若要将两种姿态类型进行划分,可以识别人体的运动姿态的特征。姿态类型就算都是变姿态的,不同的运动过程所对应的姿态变化也是无一相同的,所以运动姿态的识别同样可以用来区分不同的变姿态运动。根据一般的运动姿态的特征,把人的躯干(在本程序中,是以手掌作为基准)当做坐标系的标准,对其余空间作适当的划分,人体相应部分对应相应的区域,当姿态改变时对应区域同时发生变化,这样就可以识别人体姿态的变化,而在各个方向都可以进行相应的划分,如水平和垂直两个方向。只利用俯仰角和横滚角确定对应的空间区域,俯仰角和横滚角和偏航角会在后文相应介绍。综上所述,利用数学定义,也就是相应数据姿态的判定,可以找到人体相应部分对应的空间,从而根据空间变化得到人体的姿态变化,得到在变姿态过程中人体的姿态序列[13]。
运动捕捉系统包含了很多学科的知识,包括声学、光学、信息学、机械学、电子学、电磁学等。将其按工作原理划分,可分为微传感器MEMS式、电磁式、光学式、机械电动式、声学式等。我们常用可捕捉运动空间范围太小、抗干扰能力、数据精度、实时性、成本、使用方便程度、可捕捉运动对象的数目多少等来评价不同的设备。
(1)声学式
包括发送器和接收器,使用用超声波的较多。声波在发送过程中会产生一些时间或相位差,对它们监测计算,可得到接收器相对于发射器的位置,便可相应得到发送器的运动路线。Logitech、SAC等公司在开发该系统。
优点:成本较低。
缺点:环境影响大,噪音很容易干扰声波的监测,由于是声波传送,精确性和实时性不好。
(2)光学式
光学式主要基于视觉技术,人体上会有一些光点,利用计算机视觉技术可以对这些光点进行监测。这种方式目前是对使用者限制最小的系统。Vicon, Motion Analysis, PhoniX Tech等公司在开发该系统。
优点:对于姿态变化范围大的用户也可进行监测,能做到实时捕捉,捕捉迅速方便。
缺点:处理工作量较大,标志点容易被遮挡从而产生错误结构,设备价格昂贵,定标麻烦,后期数据处理复杂[14]。
(3)机械式
系统的每个关节之间都有刚性连接,而每个关节处都放置了角度传感器,对姿态进行各种采集。Didi、Analogous等公司在开发该系统[15]。
优点:对环境的限制小,捕捉精度较高,还原捕捉对象运动信息真实,实时性较高,可同时捕捉多个对象。
缺点:因为关节处安有传感器,所有动作幅度有限制,使用不方便。
(4)电磁式 人体运动姿态国内外研究现状:http://www.youerw.com/yanjiu/lunwen_31504.html