
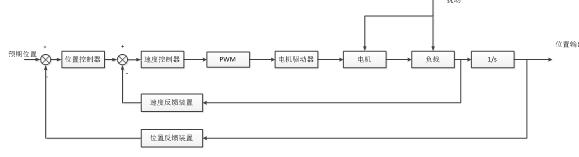
图2.1稳定平台的结构框图
稳定平台的总体结构框图如图2.1所示,它由位置控制器速度控制器、PWM、伺服电机、负载和积分器等部分组成的。系统中伺服控制单元所使用的是直流伺服的电机直接驱动系统,它包括一个编码器,一个直流的伺服电机还有一个电机驱动器。它的工作原理为:平台的实际位置与所给的位置进行比较,当作位置环的反馈,并且对它进行PID(比例(proportion)、积分(integration)、微分(differentiation))控制;速度控制器的输出,控制NUCI140产生的PWM的波的个数与频率;PWM输出到电机驱动器,由电机启动器来进行对电机的转速的控制;由于电机和负载耦合,即将负载的转速进行了控制,通过一次积分即可得到位置的输出。
MATLAB稳定平台陀螺信号的数字滤波技术研究(4):http://www.youerw.com/zidonghua/lunwen_10690.html