
静转矩是指在转子不运动的情况下产生的相抵抗的力矩。他的影响因素是绕组电流及失调角。
动转矩是指在转子转动情况下输出转矩的最大值,这一参数对步进电机性能评估有很大影响,受运行频率影响 。
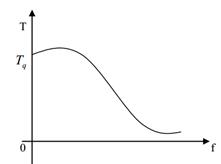
图1-1 步进电机矩频特性
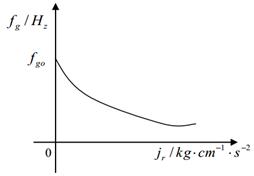
图1-2 步进电机惯频特性
(4)响应频率
低于一定频率,步进电机可以任意运行而不会产生失步的情况,则频率上限称为响应频率,通常用启动频率 作为衡量指标,也被称为突跳频率。
(5)运行频率
是指频率连续上升时电动机不产生失步的最大频率,它与负载情况有密切关系。在同样负载情况下,它高于响应频率。
步进电动机作为伺服驱动机,主要技术指标包括:步距,输出转矩,启动频率,运行频率,精度以及效率等。数字程序工作时系统的工作速度取决于电动机控制频率,用每秒脉冲数衡量,所以步进电机的频率指标特别重要 。•
2.2 步进电机选型
从构造上分类,步进电机大体可分为三种:
(1)反应式(Variable Reluctance,VR):定子上有励磁绕组、转子由软磁材料组成,分布均匀小齿。此种电机动态可靠性较低。有单段式和多段式两种。
(2)永磁式(Permanent Magnet,PM):一般为两相,转子与定子拥有一样的极数。此种步进电机动态性能好,缺点是启动运行频率不高。
(3)混合式(Hybrid Stepping,HS):混合式步进电机兼具以上两种形式的优点。此种步进电机输出力矩大、动态性能优秀,拥有广泛的应用领域。
从电机定子绕组上分类,步进电机分为二相、三相和五相等。
综合三种构造类型的步进电机,混合式步进电机分辨率和效率高,损耗小,且拥有永磁体,有较强的反电势,性能相对的有优势,应用极其广泛,所以本文就选择混合式步进电机。在相数的选择上,本文选择三相步进电机。
2.3 步进电机升降曲线优化
如果负载出现冲击转矩或过载,则会出现失步或堵转,输出转矩会随着驱动脉冲频率的升高而减小,变得稳定,因此升降频控制就是保证不失步与过冲同时尽快达到最高运行速度。
2.3.1 常用的步进电机升降曲线有以下几种:
(1)梯形曲线:算法简单,但是不能圆滑地过渡,会产生不良影响,降低电机系统的质量与寿命水准。 基于DSP的步进电机控制系统设计+源程序(3):http://www.youerw.com/zidonghua/lunwen_11193.html