
网络控制系统结构图如下:
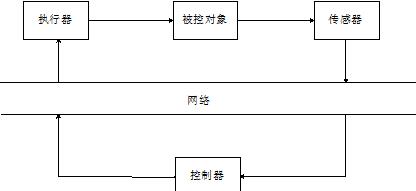
图1.1 网络控制系统结构图
网络控制系统一般由传感器、控制器、执行器、被控对象以及通信网络组成,传感器主要是对被控对象进行采样,将采样得到的数据传输给控制器,控制器的主要任务是将离散的数字信息进行运算得到所需的控制值,经过执行器的作用传输给被控对象。传统的控制系统被控对象输入输出为连续信号,控制器一般是采用计算机进行运算,为数字信号,在一个系统中同时存在模拟与数字信号。这就需要模数转换和数模转换,使系统有序运行。在此,无论是测量值的传输还是控制量的传输,都需要经过通信网络[8]。
传统的控制理论假设系统所有节点为时钟驱动,视传输过程中没有传输延时以及不存在数据包的碰撞、丢失等,然而网络的加入需重新思考系统稳定性以及控制器的设计;与此同时,网络控制系统会出现一些新的问题,具体哪些新的问题将下文将介绍,这些问题的存在为控制系统的分析和设计带来了极大的困扰[1,4,6,9]。
1.2 网络控制系统中存在的基本问题
网络控制系统的出现,虽然使得系统布线难、成本高等问题得到了解决,却引发了新的问题,基本问题如下:
1.2.1 网络调度
一个网络控制系统可能包括多个子系统,子系统之间都有可能进行信息的传输和交换,这就有可能导致数据在传输的过程中发生堵塞和冲突,网络调度指确定网络上每个节点的发送数据优先权,以及网络节点发送数据的时刻和时间间隔,目的是为了减少网络的冲突和数据的堵塞,将网络的负荷减少到一定的范围,同时使得数据包丢失率下降、时延减短。在实际的网络控制系统中,系统的性能受网络调度的直接影响[2]。
1.2.2 节点驱动方式
节点的驱动方式包括事件驱动和时钟驱动。时钟驱动方式是指节点在时钟信号下周期性的进行工作,一般而言,传感器采用时钟驱动方式进行工作;节点在一个确定的事件发生后进行相应的动作的驱动方式称为事件驱动,执行器和控制器的驱动方式可以是事件驱动,也可以是时钟驱动,相对而言,事件驱动有它的一些优点,如减少了网络诱导延时,减少了数据包的丢失以及提高了反馈数据的利用率等[7,8]。
1.2.3 数据采样
为了使得数据传输通过通信网络,必须对传输的连续数据进行采样,将其编码成数字信号,最后在接收端将其进行解码,网络控制系统中的采样是在时钟信号的驱动下进行的,一般具有非周期且时变的特性,节点在每次进行数据的传输之前,要对网络进行检测,检测网络是否处于空闲状态,若处于空闲状态,则发送数据,否则继续等待。一般而言,系统采样的频率越高越好,可是频率过高会加重系统的负担,可以根据系统的系统方程推到出采样周期和时延之间的关系,选择合理的采样周期[3]。
1.2.4 网络诱导时延
网络控制系统中进行报文传输的节点很多,对整个网络的使用采用分时复用策略,使信息传输有序进行,然而网络的承载能力有限以及数据流变化不规则,必然造成数据在传输过程中有冲突、堵塞、重传等情况,称为网络诱导时延。网络诱导时延受传输数据的数量、传输速率以及通信协议的影响而呈现出固定、有统计规律时延或有限时变时延的特性。时滞的存在极大的困扰了网络控制系统的分析和设计 [18]。
传感器到控制器的时延 指传感器采样数据信息到控制器产生相应的动作这段时延,控制器到执行器的时延 指控制器产生控制信号到执行器产生相应的动作这段时延,处理器运算速度不够快的情况下会产生运算时延 ,将运算时延归结到 中来处理,则总延时记为 。 时延分为短时延和长时延,短时延指时延 小于一个采样周期h的时延,长时延指时延 大于一个采样周期h的时延;网络诱导时延的存在对系统的性能造成了很大的影响,可大大降低系统的系能,严重时导致系统变得不稳定。所以,研究时延问题以及控制器的设计问题是非常重要的问题 Matlab时延网络控制系统的分析和设计(2):http://www.youerw.com/zidonghua/lunwen_15409.html