
此系统的主要控制机制是利用单片机制作的最小系统(一个控制发送端,一个控制接受部分)。
2 总体设计方案
基于单片机的倒车雷达系统主体包括主机和从机两大模块组成。超声波测距模块的核心部分,是国外最新开发的NRF24L01远距离数据传输芯片,其作为辅助主控部分与从属模块之间的障碍物距离发送与接收的工具。从属端的具体功能是首先用超声波测距将障碍物的距离测量出来,然后将数据保存、发送。主控端的主体功能为把从属端发送过来的数据收集并解析、距离信息的液晶提醒以及及时警示的功能。
此倒车雷达工作时,主、从两端最长可以相距90米以上,经过测试其数据也可以正常的传输。而且报警的安全距离可以再主控端手动控制。
经过对开题具体需求的分析,模块设计后确定了本设计的7个分部的大致模块:第1个是主控制模块、第2个是开关按钮电路模块、第3个数据发送模块、第4个是数据接收模块、第5个是LCD1602模块、第6个是警报模块、第7个是电源模块。
基于单片机的倒车雷达系统结构图如图2-1所示。
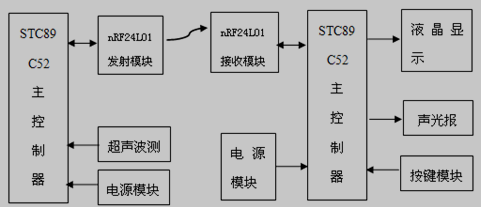
图2-1 基于单片机的倒车雷达系统结构图
3 硬件系统的设计
3.1 硬件系统设计总体方案
从属部分的测距模块通过计量超声波从发出到返回的间隔可以计算前方障碍的实际距离,经单片机的数据分析处理过后,NRF24L01芯片将从STC89C52获取到的数值用方波码值的形式发送[3]
STC89C52单片机的倒车雷达系统设计+电路图+程序(4):http://www.youerw.com/zidonghua/lunwen_77562.html