
红外传感器可用来检测地面的明暗和颜色变化,也可以探测机器人移动路径上的障碍物,而且通过多个红外光电传感器信息的综合判断,可以识别目标体相对于机器人的方位和移动方向。本次设计采用JY043W型红外反射式传感器,管压降约为1.2V,发射电流约0.2mA,该型传感器调理电路简单,安装调试方便,每一路的检测距离可以达到7cm。 当机器人某反向上有障碍物时,发射管发出的红外光遇到障碍物反射回来,接收管接收到信号后导通,则信号处理电路的输出端变为低电平,该低电平直接送入主控器的一个端口,当主控器检测到这个端口的低电平变化时,则表明在该放下你上发现障碍物。
接触式传感器选择RV-163-1C25型卫东开关作为接触传感器。该型号开关结构小巧,使用简单可靠,信号无需调理。
传感器系统安装布置如图,前方传感器组由超声波传感器检测单元和接触传感器检测单元组成。
5.4机器人视觉
机器人视觉系统是指用计算机来实现人的视觉功能,计算机从视觉传感器(摄像机)获取的图像计算出三文环境的位置,形状等集合信息,并由此识别环境中的物体,做出正确反应。
5.5机器人手爪的设计
本设计采用搬运式机械手,主要完成升降——旋转——抓取几个动作。机构简图如图1所示。
机身通过电机带动传动轴,使整体结构实现转动。
臂部通过蜗轮蜗杆传动,使用步进电机作为驱动,完成臂部的俯仰动作。
腕部通过步进电机和轴直接驱动,完成腕部的上下摆动。
手部通过步进电机驱动,实现转动,手爪的夹取动作通过电机带动丝杆带转动,丝杆带动齿轮运动,实现手爪的张开和闭合。结构如图2所示。
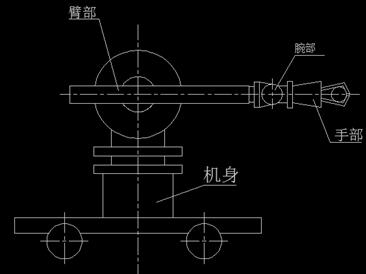
图1 机械臂的整体结构
6进度安排
1. 1.19—2015-3.8 了解课题,收集资料,并进行总结和分析讨论
2. 3.9—3.20 根据收集的资料和课题要求,进行方案论证,并完成开题报告
3. 3.21—4.3 依据设计要求和设计方案,进行总体设计分析和相关的计算校核
4. 4.4—4.24 系统设计,并绘制和修改机械结构草图
5. 4.25—5.22 绘制系统机械结构图
6. 5.23—6.5 检查并修改图纸
7. 6.6—6.19 完善设计图纸并撰写毕业设计说明书
8. 6.19—6.26 准备和进行毕业答辩 手眼式移动机器人设计开题报告(4):http://www.youerw.com/kaiti/lunwen_33777.html