DSR路由算法分布式多机器人应用层自组网络设计(3)
这个结构的优点在于可靠性高,抗毁能力强,能够动态跟踪网络拓扑的变化。其不足之处在于:每个节点都需要有较大的存储容量和比较强的处理能力,网络开销大。
2、 分层分布式移动自组网络
分层分布式网络的结构如图1.1所示。通过分层的方式减少整个网络的规模。在网络形成初期,从网络中找出一些节点,成为控制节点,这些结点通过全分布式的方式进行管理,每个控制节点都管理一组的子层节点。在需要的时候,对于上层网络继续筛选出更高层的控制节点。通过这种分层的手段,使得整个网络更加层次性,从上层来看,整个网络的规模在变小。
其实,上面所说的全分布式网络可以看作是分层式网络的一种特例,即当全分布式网络层数为一,而控制节点个数与机器人节点个数相同时。分层式的移动自组网路结构可以看作是基于基站式网络和全分布式网络的结合。
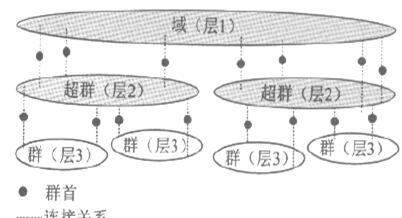
图1.1分层分布式移动自组织网络结构图
1.1.3 移动自组织网络的研究现状
作为美国国防部高级研究计划局全球移动信息系统(DARPA GLOMO)信息计划的重要组成部分,美国DARPA 已研制出无线互连网网关(WINGS),该网关以高速多跳分组无线网或Ad -Hoc网络为基础,演示了移动自组织网络的互连模型。美国DARPA资助的小规模军事演习位置识别系统 (SUA SAS)项目能提供未来dismounted soldiers信息需要的突破性技术,并能集成可演示的系统。
目前,我国对自组织网的研究还很不成熟,仍处于理论探索和各种网络协议的实验模拟和分析修改阶段。
1.2 机器人网络
在移动多机器人系统中,群体协作能力是十分重要的。许多任务必须通过多个机器人之间的相互协作配合才能完成。在任务的分配,执行过程中必然涉及机器人之间信息的交互。为了实现机器人之间的协调,每个机器人个体的传感器必须提供总共的环境描述信息以及其他机器人的信息。因此,机器人个体间或者上层控制与下层合作之间的通信是必要的,为了实现多机器人之间信息的交互,因而产生了多机器人网络技术。
1.2.1 机器人网络通信特点
相对于Internet网络,机器人网络有着其独有的一些特点:
1、 由于机器人通常是一个可移动的终端,且机器人是分散式分布,所以有线网络对于机器人网络而言是不合适的。因此,机器人网络通常是通过无线信号进行网络通信和组网。
2、 无线设备的传输范围较为有限,所以在整个通信网络中,并不是每个机器人都能直接通信,如图1.2,机器人D和B,C和D无法直接通信。因此为了实现机器人之间的通信,一般可以采用两种方法:
a) 增加中间节点作为控制节点(集中式);
b) 通过网络中其他机器人转发数据分组来实现通信(分布式)。
1.2多机器人网络结构
1.2.2 机器人网络研究现状
80年代,机器人学、分布式人工智能(DAI,Distributed Artificial Intelligence)以及分布式系统得到广泛的研究与发展,使得机器人系统朝着分布式、系统化和智能化方向发展,多机器人协调、协作、通信方面的研究成为一个热点,许多研究机构在这一领域展开理论研究,并取得了一定的成果。在各个研究机构开展的研究中,具有代表性的项目有:CEBOT系统,CMU主持研究的TraderBots系统,Collective Robotics 系统,以及欧盟的MARTHA系统。