基于弹道预测与航迹角校正的远程制导炮弹末段导引方法研究(3)
1.2 国内外研究现状
1.2.1 弹道预测研究现状
1.2.2 末段导引炮弹制导方法的研究现状
1.3 本文的主要研究内容
本文拟开展如下研究工作:
(1) 对远程制导炮弹末段制导控制所涉及的系统进行简要分析,了解整个飞行轨迹上各个飞行阶段的飞行过程,理清每个飞行阶段所需要测量的飞行参数;
(2) 以某105mm远程制导炮弹为研究对象,建立末段制导所需的飞行动力学模型,使用Matlab对模型飞行过程进行数值模拟和仿真;
(3) 选取一种弹道预测的计算方法,在远程制导炮弹的飞行末段(如距离落点2-3公里)对其落点进行快速预报;用Matlab编写计算机仿真程序,进行数据验证检测该弹道预测方法的误差,并进行误差分析与改进;
(4) 在快速、准确预报落点的前提下,开展以弹丸飞行航迹角校正为基础的末段导引律研究,绘制末段导引规律的导引曲线,并编制计算机仿真程序进行数值验证。
2 末段导引炮弹系统简介
2.1 系统组成及各部分的简介
因为本文中涉及到模拟仿真计算,所以在这里先对本文研究的对象和环境等进行表述和说明。
该末段导引炮弹系统的组成包括以下几部分:
(1) 弹体
本文研究的这一末段导引系统是以普通炮射弹丸为主体研究对象。弹体以普通炮射弹丸为模型,由弹头、弹身和弹尾三个主要部分组成。
(2) 弹上测量
本文中的弹丸在普通炮射弹丸的基础上,主体部内增加了北斗导航系统这一测量部件。可以实现实时测量弹丸质心当前所在位置的坐标(X,Y,Z)和当前的飞行速度(Vx,Vy,Vz),然后传给弹丸内的计算机,从而为主体部内的计算机进行运算提供实时准确的数据组。考虑到弹丸主体部的体积有限,所以在增加了这些部件的情况下,为了使弹载计算机能够有更好的操作和使用性,所以本文提到的该末段导引方法只采用X,Y,Z,Vx,Vy,Vz这优尔个参数进行制导。使该制导方法的适用弹型扩展到中小型弹丸,从而提高传统无控弹的射击精度。
(3) 弹丸的执行控制机构
弹丸上主要由弹丸上的舵机进行控制。舵机在接收到弹载计算机运算得出的指令后,对舵面的俯仰角度进行微调,从而改变弹丸的受力,进而改变弹丸的飞行方向。
2.2 弹丸飞行过程的介绍
该末段导引弹丸的飞行过程可以主要分为两部分。
第一部分,该弹丸为炮射弹丸,在火炮内发射后,该弹丸拥有一定的初速V0,和一确定的初始航迹角 。弹丸在升弧段为普通无孔炮射弹丸,直到降弧段某一指定位置为止。第二部分,该弹丸内的弹载北斗导航系统开始将弹丸当前的飞行参数(X,Y,Z,Vx,Vy,Vz)传送到弹载计算机上,然后弹载计算机根据这些参数预测出弹丸的飞行轨迹和落点,通过本文中提到的方法算出弹丸的修正量,然后在 时间内给弹丸一个法相加速度,在不改变弹丸速度大小的情况下,对弹丸速度的方向进行修正,从而使弹丸无限接近理想弹道,即对弹丸飞行末端进行制导。
2.3 末段导引弹丸工作原理
本文提出的末段导引方法主要分为两部分。
第一部分为弹道预测部分。通过北斗导航系统传送的当前弹丸飞行数据(X,Y,Z,Vx,Vy,Vz),来对弹丸的在没有控制的情况下自由飞行的弹道进行预测,同时预测出在无控条件下该弹丸的一着弹点。
第二部分为末段导引部分,原理如下图所示[32]。
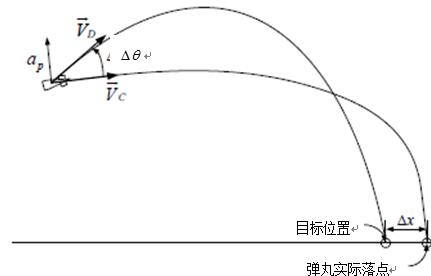
图2.3.1 不同航迹角下的当前弹道和理想弹道
在图2.3.1中, 表示当前速度矢量和理想速度矢量。在不进行任何控制的情况下,弹丸在当前速度 下不能打到预定目标。然而当弹丸在速度 下时,弹丸可以沿着弹道轨迹击中预定目标。我们假设两速度矢量数量级相同,即 = ,航迹角不同。航迹角的差异被定义为 。弹道倾角不可能从 突变到 。因此,我们需要在一个周期 内完成航迹角的改变,从而使弹丸的飞行轨迹回到理想弹道上,以实现制导。