DSP全向移动式家用服务机器人设计+PCB电路图+源程序(2)
5.5 本章小结 43
结论 44
致谢 45
参考文献 46
附录A 外接板电路原理图 49
附录B 外接板PCB图 50
附录C 主程序模块代码main.c 51
附录D 编码器读数模块代码encoder.c 56
附录E Dr+Pu模块代码servo_motor.c 58
附录F I2C通讯模块代码iic.c 59
附录G 红外测距模块代码led_sensor.c 62
附录H 直流电机控制模块代码motor.c 64
附录I 底盘控制模块代码dipan.c 68
附录J 电子指南针模块代码compass.c 73
附录K SCI通信代码Sci_TX.c 75
附录L PWM模块代码servo.c 76
1 绪论
1.1 课题来源及研究意义
现如今,工业机器人已经取代工人进入各行各业,极大地提高了工厂的工作效率。比尔•盖茨曾预言机器人将会像个人电脑一样进入人们的家庭。这里的机器人指的便是服务机器人。国际机器人联盟(International Federation of Robotics,IFR)经过几年的搜集整理,给了服务机器人一个初步的定义:服务机器人是一种半自主或全自主工作的机器人,它能完成有益于人类福祉的服务工作,但不包括从事生产的设备[1]。其基本组成如图1.1所示。
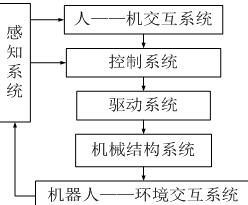
图1.1 服务机器人基本组成图
目前,服务机器人的应用范围已经涉及民用、警用、军用、水下、飞行、空间等多个领域[2]。服务机器人所具有的持续不断、服从人的意愿而工作特点,可以极大地减少人的工作时间,提高人们的生活质量。尽管目前为止,服务机器人技术的发展现在还未到达人们所预期的程度,但是我们可以看到,在劳动力成本上升、老龄化人口增加、物联网不断得到完善等一系列问题的影响之下,服务型机器人终将会走进人们的生活,走进家庭,使人们的生活变得更加美好[3][4]。服务型机器人技术作为一个有着巨大影响力的高新技术领域,其将会是本世纪各个行业的重要组成部分,也将是我国高新科技产业发展的一次重大机遇,对于提升我国的国际竞争力具有着重要的战略意义[5]。《国家中长期科学和技术发展规划纲要(2006~2020年)》[6]中明确指出将服务机器人作为未来优先发展的战略高技术,并提出“以服务机器人应用需求为重点,研究设计方法、制造工艺、智能控制和应用系统集成等共性基础技术”。
而在家用服务机器人技术领域中,担当机器人大脑和神经系统的机器人运动控制系统自然是重中之重。
1.2 机器人运动控制系统概况
1.2.1 运动控制系统概念
依据文献[7]中对控制系统的定义为:以自动控制理论为基础,以电机为控制对象,以控制器为核心,以电力电子及功率变换装置为执行机构,组成高精度的电气传动系统。
从定义中可以看出:
1)运动控制系统是一种以弱电控强电、以小功率信号控制大功率负载的系统;
2)控制系统有一定的运算能力,以加入相应的控制算法;
3)控制系统的实时性能要好,动态性能良好,以保证高的稳定精度和定位精度。
1.2.2 运动控制系统的种类
直至目前为止,机器人的运动控制系统主控制器大概有如下几种:
1)硬件模拟电路硬件
早期的的运动控制系统一般采用此种控制器作为主控制器。这种模拟主控制器能够实现系统的高速控制,但是由于其系统较复杂而致使系统可靠性降低,并且由于其是纯硬件搭建而使日后系统的升级和文修较为麻烦。
上一篇:暖气散热片高速修边机设计