
1.1.2 微处理器和数字信号处理器技术的发展
在电机的控制系统发展史中,最初的控制系统是由模拟器件构成的,模拟控制系统控制精度不高、易于老化、文护成本高、控制功能单一。微处理器的出现,使控制系统逐渐进入了模数混合控制模式,电机专用控制电路被大量应用于电机控制当中,大大提高了电机控制器的可靠性、抗干扰能力,缩短了产品的开发周期,降低了研制费用。
目前,适用于电机系统控制的控制器有单片机和数字信号处理器两种。数字信号处理器DSP是于上世纪九十年代才出现的,是一种面向快速信号处理的运算器,它的运算速度快。如德州仪器生产的CZ000系列UDSP主频最高可以达到150MHz。采用DSP构成全数字电机控制系统,可以实现控制功能的软件化,提高控制的实时性,降低系统的成本,并且可以方便的实现更先进的控制策略。本文的电机矢量控制系统正是基于德州仪器(TI)的TMS320F2812这款数字信号处理器实现的 [9]。
1.2 变频调速控制技术及发展
1.2.1 矢量控制技术
矢量控制理论(Trans Vector Control)是有美国科学家和德国科学家在上世纪七十年代初分别提出来的,在经过了近半个世纪的补充和完善后,使得矢量控制技术在工农业生产中的作用越来越突出[10] [11]。
交流电机的矢量控制技术就是通过建立电机的可靠数学模型,把定子上的电流矢量分解成励磁电流矢量和转矩电流矢量,进行分别控制其大小和方向,使其合并成变频器可控的有效信号。它是建立在对直流调速系统的深入研究的基础上的仿直流系统,它实现了交流电机控制的直流化,极大地提高了交流调速的稳定性、高效性和易操作性。
如图2.1所示,异步电机的矢量控制的基本思路是通过电流的坐标变换,把定子上的三相对称交流电 、 、 通过坐标变换变换到同步旋转坐标系d-q轴系下的两相直流电流(在同步旋转坐标系下,始终保持d-q轴系中的d轴与转子磁场的方向一致),也就是通过数学变换把三相交流电动机的定子电流分解成两个分量:用来产生旋转磁动势的励磁分量 和用来产生电磁转矩的转矩分量 ,然后像控制直流电机那样分别对磁场与转矩的进行独立控制,再由变换方程把控制结果转换为随时间变化的瞬时变量,因此系统控精度高,频率特性好,转矩动态响应速度快捷。
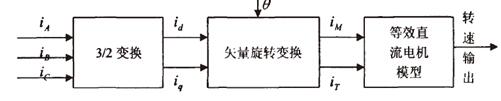
图2.1电机坐标变换示意图
1.2.2 直接转矩调速技术
1985年,德国鲁尔大学的DePenbrock教授首次成功使用了直接转矩控制变频技术。直接转矩控制也称之为“直接自控制”,直接转矩控制的思想是以转矩为中心来进行磁链、转矩的综合控制。和矢量控制不同,直接转矩控制不采用解耦的方式,从而在算法上不存在旋转坐标变换,简单地通过检测电机定子电压和电流,借助瞬时空间矢量理论计算电机的磁链和转矩,并根据与给定值比较所得差值,实现磁链和转矩的直接控制[12]。矢量控制和直接转矩控制性能比较如表1.1所示。
表1.1 矢量控制和直接转矩控制性能比较
开环控制 闭环控制
矢量控制 直接转矩控制 矢量控制 直接转矩控制
稳态速度精度 高 低 高 低
动态速度精度 大 小 大 小
动态转矩响应 慢 快 慢 快 基于DSP的交流电机矢量控制系统设计(3):http://www.youerw.com/zidonghua/lunwen_12093.html