
4.1.2 模糊集合 24
4.1.3 模糊规则和模糊推理 25
4.1.4 反模糊化 26
4.2 模糊控制系统简介 27
4.2.1 模糊控制系统的组成与原理 27
4.2.2 模糊控制器设计的基本方法与步骤 28
4.3 二级倒立摆模糊控制器的设计 29
4.4 基于模糊控制器的二级倒立摆控制系统的MATLAB仿真 32
4.4.1 二级倒立摆模糊控制系统的仿真波形 32
4.4.2 量化因子和比例因子对模糊控制器性能的影响 34
4.5 模糊控制器的特点与局限性 34
5 总结和展望 36
致 谢 38
参考文献 39
1 绪论
1.1 倒立摆系统简介
当人用手托起一根立起的竹竿时,它会通过手臂的不断移动来保持平衡,使竹竿不倒。假如两根竹竿上下连在一起(自由连接),还能长时间保持稳定直立吗?通过实验仪器将这样的两根杆在自由连接状态下立起来,最下边的一根杆与滑轨上的小车自由连接,通过小车在滑轨上左右移动来保持两根杆直立不倒。这就是二级倒立摆,二级倒立摆装置如图1.1所示。
图1.1 直线倒立摆本体 图1.2 电气控制箱
本实验控制装置是由固高科技(深圳)有限公司开发的直线倒立摆系统[1]。倒立摆系统包含倒立摆本体、电控箱及由运动控制卡和普通PC机组成的控制平台等三大部分。
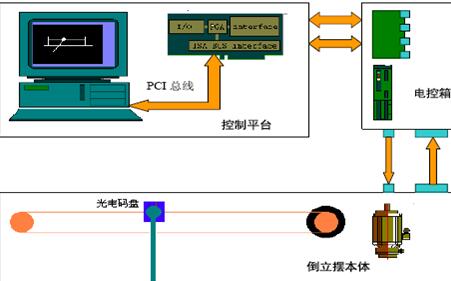
图1.3 倒立摆系统组成框图
直线倒立摆本体:直线倒立摆本体(参见图1.1)由基座、交流伺服电机、同步带、带轮、滑竿、滑套、滑台、摆杆、角编码器、限位开关等组成。小车由电机通过同步带驱动在滑杆上来回运动,保持摆杆平衡。电机编码器和角编码器向运动控制卡反馈小车和摆杆位置(线位移和角位移)。
电气控制箱:电控箱(参见图1.2)内安装有如下主要部件:交流伺服驱动器、I/O接口板、开关电源、开关和指示灯等电气元件。
控制平台:控制平台主要由以下部分组成:与IBM PC/AT机兼容的PC机、GM400运动控制卡、GM400运动控制卡用户接口软件、演示实验软件。
1.2 倒立摆系统的研究意义和目的
倒立摆系统作为研究控制理论的一种典型的实验装置,具有成本低廉,结构简单,物理参数和结构易于调整的优点,然而倒立摆系统本身所具有的高阶次、不稳定、多变量、非线性和强耦合的特性,是一个绝对不稳定系统,可以作为一个典型的控制对象对其进行研究[2],必须采用十分有效的控制策略才能使之稳定。在控制过程中,它能有效地反映诸如可镇定性、鲁棒性、随动性以及跟踪等许多控制中的关键问题,是检验这种控制理论的理想模型。因此,倒立摆系统是研究变结构控制,非线性控制,目标定位控制,智能控制等控制方法理想的实验平台,再将经过测试后的控制理论和控制方法应用到更为广泛的领域中去[2]。
倒立摆系统除了很强的理论意义,同时也具有深远的实践意义。从日常生活中所见到的任何重心在上,支点在下的控制问题,到空间飞行器和各类伺服云台的稳定,都和倒立摆的控制有很大的相似性;同时其动态过程与人类行走姿态类似,其平衡与火箭的发射姿态调整类似。所以,对倒立摆的稳定控制在实际中有很多用处。如海上钻井平台的稳定控制、卫星发射架的稳定控制、火箭姿态控制、双足机器人行走控制[3]、飞机安全着陆等都属于这类问题。 二级倒立摆的控制系统设计+MATLAB仿真(2):http://www.youerw.com/zidonghua/lunwen_17745.html