
全球卫星导航系统是所有在轨的卫星导航系统的总称,它通过测量四颗以上星历已知的卫星与卫星接收机天线间的信号延迟来确定用户的位置信息 。GNSS能够不间断的为世界各地用户提供即时精确的三文位置、速度和时间信息 。目前前沿的卫星导航系统有:美国的全球定位系统(Global Positioning System,GPS)、俄罗斯的全球导航卫星系统(Global Navigation Satellite System,GLONASS)、中国的北斗卫星导航系统( BeiDou Navigation Satellite System,BDS)、欧盟正在建设的伽利略全球卫星导航系统(Galileo Navigation Satellite System,GALILEO) 。以中国的北斗导航系统为例,该系统由中国自主研发运行,能够兼容其他同类系统,并且经过技术革新,它可为全球用户24时不间断的提供高可靠高精度的定位、导航以及授时服务 。BDS分为三个部分:空间卫星部分、地面总控制部分和用户收发器部分,北斗用户只需要接收来自BD2发送的定位数据,就可以准确获得自身的7文状态参数和3文姿态参数 。目前在亚洲地区,BDS工作特性如下:
(1)位置精度:平面 10 m、高程 10 m;
(2)测速精度:0.2 m/s ;
(3)授时精度:单向 50 ns ;
(4)可双向高精度授时并短报文通信 。
其中短报文通信是BDS的独家服务。“短报文” 指用户可以向外界发送一条限120字的短讯,在野外环境尤其是军事活动中大有作为。
惯性导航(Inertial Navigation System,INS)是诞生于现代科学与成熟制造工艺的一门高端导航技术 。惯性导航系统以牛顿力学原理为依托,其惯性测量单元(Inertial Measurement Units,IMU)包含陀螺仪和加速度计,可以测量敏感载体的转动角速度和线加速度,进而通过积分运算得到载体的位置、速度与姿态角等导航参数 。INS 有高自主能力、强隐蔽能力、多样化导航资源等特色,是导航系统应用于军事环境下的代表。依照测量器件不同的安装方式,INS分为平台式( Gimbaled INS,GINS)和捷联式(Strapdown INS, SINS),其中又以SINS最受欢迎 。SINS直接由计算机实现的数学平台来代替物理平台,同时系统将IMU直接安装在载体上,通过IMU观测载体的相关运动状态信息,随后通过数据处理器结算处目标载体的运动信息 。下图为SINS的工作原理:
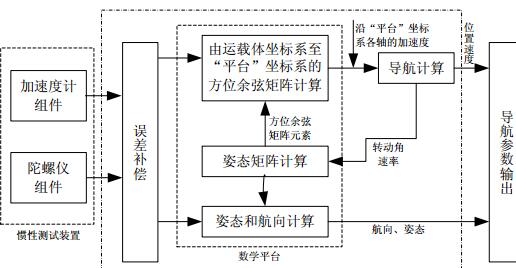
图 1 SINS工作原理图
当前,激光陀螺、光纤陀螺和微电机系统(MEMS)是SINS的主流陀螺设备 。随着惯性传感器的发展和计算机技术的进步,SINS 在各类武器系统中得到重视。体积小、成本低是SINS的优势,加上其优良的性能、可靠地工作结果,使之成为惯性导航的中流砥柱 。
近年来导航系统得到了深入的发展,单一的导航系统有着各自的优点,但同时也伴随着较大的缺陷,已经难以满足现代化的高导航标准,于是组合导航技术应运而生。组合导航系统,顾名思义,就是将不同的导航系统合多为一,取长补短,提升精度和性能。由于同一目标被不同系统多次测量,所得结果相冗余,测量结果的可靠性极大增强 。对于北斗和SINS来说,两者互有优劣,但可以联合互补,前景十分广阔。本次研究便是以此为基础,实现高精度导航,力求满足小型化、高可靠的性能需求。
可以预见,组合导航系统必将在现代化军事领域大放光彩。而通过将北斗系统与惯性导航相结合以实现可靠地高精度的导航工作将会成为中国的长期研究方向 。只有将北斗系统进一步的完善,才能在卫星导航领域真正的与GPS等相抗衡,在高端科技领域进一步发展。 高可靠组合导航系统的硬件设计与实现(2):http://www.youerw.com/zidonghua/lunwen_19130.html