磁流变液阻尼器的半主动闭环控制系统设计+CAD图纸(3)
时间:2018-04-12 20:00 来源:毕业论文 作者:毕业论文 点击:次
2.1 磁流变液以及磁流变液阻尼器简介 2.1.1 磁流变液和磁流变效应 磁流变液是一种可控的流体,属于智能材料,主要是由高磁导率、低磁滞性的软磁性颗粒,和非导磁性液体混合而成[13]。磁流变液在零磁场条件下呈现出低粘度的牛顿性流体特性,在磁场作用下,则呈现高粘度、低流动特性,并且这种变化是瞬时、可逆的,这就是磁流变效应。磁流变效应的机理还不十分明确,现在普遍认为,磁流变效应是由于悬浮在磁流变母液中的软磁性颗粒,在外加磁场的作用下极化形成的[14]。在无外加磁场时,磁流变液中的软磁性颗粒随机分布,当外加磁场作用时,这些颗粒产生极化成链,此时磁流变液流动受阻,呈现出固体状态此过程如图2.1所示: 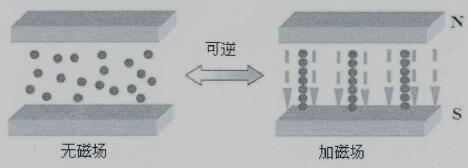 图2.1 磁流变液流变机理 2.1.2 磁流变液阻尼器 磁流变阻尼器是以磁流变液为工作介质的阻尼器,它利用磁流变液的流变特性,通过改变磁流变液周围的磁场强度来控制输出阻尼力的大小。典型的磁流变阻尼器由活塞、线圈、活塞杆、磁流变液腔、活塞缸体以及磁流变液组成。根据缸体虹筒和活塞杆的匹配关系可以将阻尼器分为单出杆式、双出杆式和双筒单杆式[15]。本次采用的阻尼器为单出杆式,其工作介质为MRF-T01T型磁流变液。阻尼器构造具体可以参照图纸中的磁流变液阻尼器的A1部件图。 磁流变阻尼器主要有三种工作模式:压力驱动模式、剪切模式、挤压模式[16],如图2.2所示: 图2.2 磁流变液阻尼器的三种工作模式 现在绝大多数阻尼器都是采用的剪切和挤压的混合模式,与传统阻尼器相比,磁流变液阻尼器具有结构简单、阻尼力可调、能耗低、提供阻尼力大、响应快速等优点,使其在振动控制领域得到了广泛的应用。 2.2 磁流变液阻尼器的力学模型 2. 2. 1静力学模型 MRF (磁流变体)在MRFD(磁流变阻尼器)内运动,一般均可近似的等同于无限大平行平板间的几种不同的运动方式。根据流体受力状态和流动特点不同,磁流变阻尼器主要分为剪切式,阀式,剪切阀式和挤压流动式。 2. 2. 2动力学模型 采用磁流变阻尼器进行结构半主动控制时,建立较为精确的磁流变阻尼器动力学模型是设计控制策略和获得良好控制效果的关键因素之一,也是阻尼器模型的输出和控制仿真分析具有较高可信度的有力保障[17]。但是流变后的磁流变体的动态本构关系很复杂,其动态阻尼力呈现强非线性,很难用流变力学理论分析,因此有必要建立基于试验结果的磁流变阻尼器的数学模型[18]。 到目前为止,国内外学者在充分考虑磁流变体屈服过程不同阶段的特点和磁流变液阻尼器结构特点的基础上,建立了一些磁流变阻尼器的动力学模型,大致可以分为两类:参数化模型和非参数化模型[19]。非参数化模型在结构上相当复杂,因而国内外学者对参数化模型的研究比较相对多,参数化模型主要有宾汉姆(Bingham)粘塑性模型[20],修正的宾汉姆粘塑性模型,非线性双粘性模型,非线性滞回模型,粘弹塑性模型,修正的Dahl模型,Bouc-Wen模型,修正的Bouc-Wen模型等[21]。 2.3 磁流变液阻尼器减振控制技术 振动控制可以分为被动控制、主动控制、半主动控制和混合控制。被动控制是一种不需要外部能源输入提供控制力,控制过程不依赖结构反应和外界干扰信息的控制技术。同理,主动控制是由外加能源控制的。主要由传感器、运算器和执行器三部分构成。半主动控制是有少量外加能源的控制。混合控制是同时应用被动控制和主动控制,或同时应用不止一种控制装置的控制方法。四种控制技术中,主动控制效果最好,但需要的外加能源较大,控制算法也较复杂;被动控制容易实现但控制精度不高;半主动控制[22]综合了主动控制和被动控制的优点,它既具有被动控制系统的可靠性,又具有主动控制系统的强适应性。很多研究表明,合理的半主动控制系统能够实现主动控制系统的控制效果[23],因此半主动控制具有广阔的应用和发展前景。混合控制可以综合集中控制方法的优点,具有良好的控制效果,但结构相对比较复杂。 (责任编辑:qin) |