火炮膛内拍照机器人控制系统方案设计及联合仿真(2)
时间:2018-04-17 21:34 来源:毕业论文 作者:毕业论文 点击:次
4.1 膛内拍照机器人联合仿真建模 38 4.2 膛内拍照机器人联合仿真结果分析 41 4.3 本章小结 43 结束语 44 致 谢 45 参考文献 46 附录A 膛内拍照机器人主要控制程序 48 附录B 膛内拍照机器人电路仿真图片 49 附录C 膛内拍照机器人变径功能ADAMS仿真视频 50 附录D 膛内拍照机器人身管行进ADAMS仿真视频 51 1 绪论 1.1 本课题的研究意义 炮膛内部损伤的检测一直都是火炮探伤检测中相当重要的部分,直接决定了火炮的损伤等级、修复方法和继续使用寿命。由于炮膛所处的极端工作环境,且炮弹直接和炮膛过盈接触,因此炮膛容易造成损伤。传统的检测方式如光学窥膛镜、齿轮齿条传动机构等有诸如检测结果客观性差或者操作、携带不方便等缺点。为了满足检测结果的高精度、高自动化程度及良好的稳定性要求,为火炮膛内探伤提供更加科学、更加准确的检测结果,并同时兼顾携带方便、操作简单的特点,因此研究一款膛内自动拍照设备具有重要意义。 1.2 膛内拍照机器人的发展概述 1.3 膛内拍照机器人的结构与原理分析 膛内拍照机器人的研究工作分为结构设计与强度计算和控制系统及其机电系统联合仿真两个部分。本文则是在第一部分工作的基础上重点研究的是膛内拍照机器人的控制系统设计及其机电系统联合仿真。在此之前,先简要分析一下自行设计出来的膛内拍照机器人的结构,并对其工作原理进行简要介绍。 1.3.1 膛内拍照机器人的结构分析 该膛内拍照机器人的工作环境是口径为122mm——155mm、长度为8m的自行火炮身管,工作时调整身管至水平位置。该膛内拍照机器人的机架为铝合金制圆筒,直径为80mm,以适应身管形状。在机架上用转动副将三个支撑架按照120°沿圆筒状机架均匀分布,支撑架末端用直径为30mm的驱动轮与身管内圆柱面贴合。支撑机构如图1.1所示。 图1.1 支撑机构 由于机械整体的自身重力作用,会导致三根支撑杆件所受压力不均。为了保证整个膛内机器人能顺利前进,故将其中一根支撑杆件放置在通过圆心的铅垂方向。为了控制最大压力杆件的压力,在此根杆件中安装压阻式压力传感器,并通过单片机进行压力测量。为了保证整个机构沿炮膛身管的中心轴线稳定前移,则三根支撑架的加工精度和安装精度要求相对较高。 在驱动方面,选用高精度大扭矩步进电机实现精确定位和大扭矩驱动,安装方式为步进电机转轴轴线与身管轴线重合。为了使传动足够平稳而不发生抖动,同时将炮筒身管轴线方向的转动装化为垂直于身管母线平面的转动,我们研究了微小管道机器人三轴差速器的设计原理[8],采用三蜗轮单蜗杆的传动方式实现此功能。这两者唯一的差别在于:三轴差速器可以适用于管道拐弯的工况之下,而三蜗轮单蜗杆传动只能在直管中行进。此次设计的工作环境是精度很高的自行火炮身管,采用三蜗轮单蜗杆传动完全可以符合要求。此外,虽然蜗轮蜗杆传动平稳低噪,但效率低发热量大的问题同样无法回避。为此设计时进行了热平衡计算,采用脂润滑、空气自然冷却的方式可以满足其散热要求。传动机构主、俯视图分别如图1.2、图1.3所示。 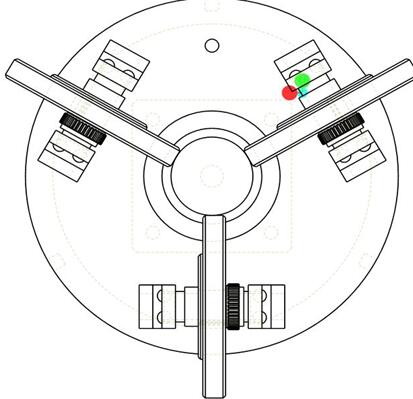 (责任编辑:qin) (责任编辑:qin) |