- 上一篇:曲面FSS的设计与仿真研究+文献综述
- 下一篇:基于FPGA和ARM的适配器硬件设计
5.1 图像二值化 21
5.2 形态学处理 22
5.2.1 膨胀 22
5.2.2 腐蚀 23
5.2.3 开运算与闭运算 23
5.3 图像比对 24
5.4 缺陷识别标记 25
5.5 Matlab实现缺陷检测 26
结 论 28
致 谢 29
参考文献30
1 引言
1.1 课题研究背景
在工业自动化中,机器视觉应用越来越广泛。现阶段,主要在产品零部件检测中应用较多。由于人工检测有很多弊端,例如需要投入大量劳动力来进行检测,而且检测效率较低。在一些要求较高的场合,例如高速生产环节,高精度检测要求,人工不一定能检测出来。而且人工检测有一定的主观性,不能统一检测标准,造成产品的质量检测不一。然而应用机器视觉却能避免这些缺点。将机器视觉应用于产品的缺陷检测中,极大提高了检测效率跟精度。
产品的检测,首先需要经过机器视觉采集产品的图样。然后运用图像配准技术将图像进行配准,接着将配准图像与标准图像进行比对,检测是否存在缺陷。所以本文还研究了如何进行图像的配准跟比对。并对缺陷进行识别,检测良品。
1.2 机器视觉概述及原理
1.2.1 机器视觉概述
视觉在人类感知外部环境的过程中扮演着重要的角色。大量数据表明,人类从外部环境获取的信息中,视觉信息约占有百分之八十。然而,在一些人类视觉无法胜任的领域,例如在精确定量感知,高速检测判定,危险场景感知和不可见物体感知的状况下,机器视觉更加突显出其优势。机器视觉就是采用机器对客观事物进行识别、判定、检测,主要是通过计算机模仿人类的视觉功能。
1.2.2 机器视觉的发展
20世纪50年代,统计模式识别方法的出现,标志着机器视觉的开始。那时的研究重点主要是针对二文图像进行剖析,例如光学字符判辨、工件外表、显微照片、航空图像的分辨和解析等。
20世界60年代,Roberts提出了“积木世界”的概念,他认为周围的客观事物都是由多面体构成,可以通过简单的点、直线、平面来表示需要识别的客观事物。独特的三文世界理论为后续的研究奠定了重要基础。
20世纪70年代,视觉应用系统应运而生。1977年,Marr提出了Marr视觉理论,此理论为机器视觉理论的研究发展做出了巨大贡献。
20世纪80年代,机器视觉步入快速列车轨道。关于机器视觉的新概念、新理论、新方法接连产生,例如主动视觉理论框架、基于感知特征群的物体识判定理论框架等。
20世纪90年代,机器视觉被广泛地应用于工业产品检测中,并且基于多视觉几何的理论也快速发展起来。
1.2.3 机器视觉系统构成:
机器视觉系统一般以计算机为中心,主要由视觉传感器、高速图像采集系统、专用图像处理系统等模块组成[1],如图1-1所示。
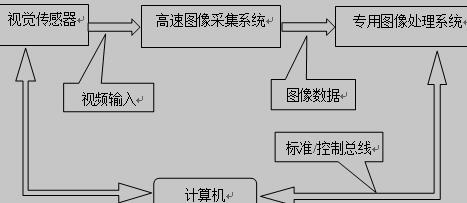
图1-1 机器视觉系统的基本构架
(1) 视觉传感器。
机器视觉系统的全部信息是通过视觉传感器直接获取的。视觉传感器主要是由多个图像传感器构成的,有时为了混去较为复杂的图像,常常增加光投射器和其他的辅助设备。主要功能是采集足量的初始图片来让机器视觉系统进行后续处理。
(2) 高速图像采集系统。
高速图像采集系统是从视觉传感器中取得模拟视频信号,通过高速图像采集系统实时转化成为数字信号,将此数字图像信号输送给后端的计算机,进行图像处理并将处理后的图像显示出来。若此计算机搭配有专用图像处理系统,可以将数字信号送到此系统进行实时处理。
-
小波分析用于图像增强的研究MATLAB仿真
-
基于多指标决策的通信网...
-
线阵DOA估计及波束形成算法MATLAB实现
-
Matlab小波分析用于图像压缩的研究
-
MATLAB中继选择方案设计与仿真
-
MATLAB波束成形方法仿真分析
-
Matlab非线性时延网络控制...
C++最短路径算法研究和程序设计
g-C3N4光催化剂的制备和光催化性能研究
中国传统元素在游戏角色...
现代简约美式风格在室内家装中的运用
上市公司股权结构对经营绩效的影响研究
浅析中国古代宗法制度
巴金《激流三部曲》高觉新的悲剧命运
江苏省某高中学生体质现状的调查研究
高警觉工作人群的元情绪...
NFC协议物理层的软件实现+文献综述