- 上一篇:基于神经网络的配电网理论线损计算及节能降损策略的分析与研究
- 下一篇:线性时滞系统的多目标控制器设计与仿真
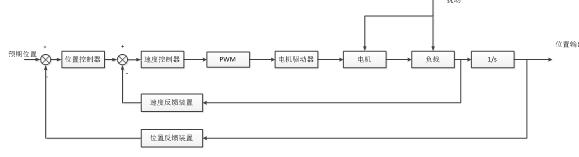
图2.1稳定平台的结构框图
稳定平台的总体结构框图如图2.1所示,它由位置控制器速度控制器、PWM、伺服电机、负载和积分器等部分组成的。系统中伺服控制单元所使用的是直流伺服的电机直接驱动系统,它包括一个编码器,一个直流的伺服电机还有一个电机驱动器。它的工作原理为:平台的实际位置与所给的位置进行比较,当作位置环的反馈,并且对它进行PID(比例(proportion)、积分(integration)、微分(differentiation))控制;速度控制器的输出,控制NUCI140产生的PWM的波的个数与频率;PWM输出到电机驱动器,由电机启动器来进行对电机的转速的控制;由于电机和负载耦合,即将负载的转速进行了控制,通过一次积分即可得到位置的输出。
-
基波磁通补偿的串联混合...
-
PLC变压器升降平台控制系统设计+梯形图
-
MATLAB数字图像处理的空间滤波器设计
-
MATLAB温室作物蒸腾作用建模与试验
-
数字图像处理的温室作物...
-
轧钢加热炉控制系统的设计MATLAB仿真
-
AMESim半潜式海洋平台主动波浪补偿系统开发
高警觉工作人群的元情绪...
江苏省某高中学生体质现状的调查研究
NFC协议物理层的软件实现+文献综述
中国传统元素在游戏角色...
上市公司股权结构对经营绩效的影响研究
现代简约美式风格在室内家装中的运用
浅析中国古代宗法制度
巴金《激流三部曲》高觉新的悲剧命运
C++最短路径算法研究和程序设计
g-C3N4光催化剂的制备和光催化性能研究