- 上一篇:基于VC和Fluent开发油罐目标温度场求解软件
- 下一篇:matlab基于多体系统传递矩阵法的旋翼无人机建模与分析研究
现有的论文讨论的主要都是三到四个智能体[9],而它们采用的纯方位编队控制算法不适用于智能体数量更多的智能体系统,因此有必要探索出一种能拓展到数量更多的纯方位编队控制算法。
(4)纯方位编队规模控制问题。
事实上,纯方位编队控制的编队规模是不可控的,而基于距离测量的编队控制可以确定编队的大小。可以采用距离和方位混合控制来确定编队的规模[8],但这一方法需要额外的量测信息。
(5)避免碰撞问题。
任何编队控制问题都要求避免碰撞,但是没有距离测量避免碰撞又难以实现[7]。对于分散式纯方位多智能体编队问题,要如何避免碰撞是一个亟待解决的方向。
1.4 本文主要研究内容
本文的研究课题是多智能体分布式纯方位编队控制算法,第二部分主要对较为基础的多智能体纯方位三角形编队控制算法进行了介绍和分析,并用matlab进行了仿真实验;由于传统的多智能体纯方位三角形编队控制算法无法对编队队形的规模进行控制,因而第三部分结合距离和角度测量对三角形编队控制算法进行研究,并进行了仿真实验。针对三个以上智能体纯方位编队控制算法的问题,本文第四部分对这一问题进行了介绍和分析,并用matlab对进行了相应的仿真实验。验证了上述几种算法的可行性,并对仿真结果进行了分析和总结。
此外,在多智能体纯方位三角形编队控制算法中,还研究了多智能体系统遇到单个智能体无法移动和多智能体拥有相同的组速度情况下的编队控制。研究距离角度混合约束的三角形编队控制算法时,由于其是一种非紧约束的算法,对其在个别参数固定和运动中参数不停变化两种情况下进行仿真讨论。最后在对三个以上智能体纯方位编队控制算法中,不仅讨论仿真了理想情况下的编队控制,而且对测量存在误差情况下的编队控制进行了仿真分析。
2 多智能体纯方位三角形编队控制
2.1 控制对象及控制问题描述
我们考虑一组在平面 ,智能体数量为 的多智能体系统,每个智能体通过无向拓扑相互连接,定义多智能体系统 ,其中顶点集 表示每个智能体, 为各智能体间的连接集合。每个智能体的位置是 ,智能体 的邻居集合 表示存在一条通信链路到智能体 的节点的集合。在三角形编队控制问题中,令, 。
为了方便编队的角度控制,引入智能体间的夹角 , 表示 集合里智能体 的两个邻居智能体朝向智能体 所成的夹角。显而易见,编队的形状完全取决于 , 。为了方便 的计算,首先从智能体 的局部坐标系 方向起始朝向智能体 测量方位,测量角度为 , (数值为正是逆时针,负数则为顺时针)。可得
(1)
, 分别是智能体 在局部坐标系朝向智能体 和智能体 的角度, 是智能体 智能体 朝向智能体 所成的夹角,其范围是 到 。因此可以给出夹角
(2)
其中 。另外这里要注意 和 的含义不同,两者都说明三个智能体共线,但 指明了智能体 在智能体 和智能体 的一侧,而 说明智能体 在智能体 和智能体 的中间。
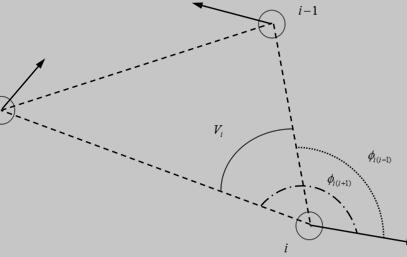
图1.1三角形智能体角度示意图
定义期望获得的稳定状态下编队的角度为 。那么 完全确定了期望的三角形编队形状,但是不能确定编队的规模大小。
引入假设:
假设1 期望的内角 (即控制的目标),满足 。这里排除 , 和 的情况。
-
Protel99SE多功能充电宝的设计+PCB电路图
-
ZigBee智能煤气表的设计
-
STC89C52单片机的智能红外报...
-
多功能模态切换有缆遥控...
-
STC12C5A单片机多自由度双足机器人设计
-
城乡交通一体化—以吉林市为例
-
PLC多径电力线通信信道模型的设计与仿真
C++最短路径算法研究和程序设计
中国传统元素在游戏角色...
浅析中国古代宗法制度
NFC协议物理层的软件实现+文献综述
巴金《激流三部曲》高觉新的悲剧命运
现代简约美式风格在室内家装中的运用
上市公司股权结构对经营绩效的影响研究
高警觉工作人群的元情绪...
江苏省某高中学生体质现状的调查研究
g-C3N4光催化剂的制备和光催化性能研究