
若能充分发挥这些优势,就相当于获得了一种对复杂系统进行控制的新手段。我们应该发现的是,控制领域对神经网络结构简单性和实时性有较高要求,这是神经网络走向实用的关键。在控制领域内神经网络发展的主要动力有三个方面:(1)越来越多的复杂的系统需求需要去处理;(2)实现越来越高的设计目标的需求;(3)在越来越不确定的情况下进行控制的需求。
2 在系统建模和控制中常用的神经网络
2.1 BP神经网络
2.1.1 BP神经网络的结构
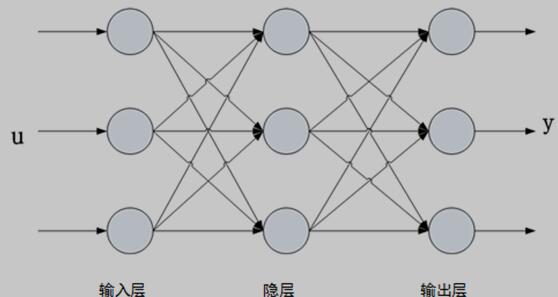
图1 BP神经网络的结构
BP(Back Propagation)网络,即误差反传误差反向传播算法的学习过程,由信息的正向传播和误差的反向传播两个过程组成。是一种多层前向的单向传播网络,结构如图1所示。在图1中可以看出,BP网络是一种拥有三层或以上的神经网络,包括输入层、隐含层和输出层。上下层之间实现全连接,但是在每层的神经元之间彼此没有连接输入层各神经元负责接收来自外界的输入信息,并传递给中间层各神经元;中间层是内部信息处理层,负责信息变换,根据信息变化能力的需求,中间层(隐含层)可以设计为单隐层或者多隐层结构;最后一个隐层传递到输出层各神经元的信息,经进一步处理后,完成一次学习的正向传播处理过程,由输出层向外界输出信息处理结果。随着这种误差反向的传播修正不断进行,网络对输入模式响应的正确率也不断上升。
2.1.2 BP神经网络的主要优缺点
BP网络的主要优点是:(1)只要有足够的隐藏层和隐藏的节点,可以近似任意非线性映射关系;(2)的BP网络学习算法属于全局近似方法,因此具有更好的泛化能力;(3)BP网络的输入输出之间的关联信息分布地存储于连接权中。由于连接权的个数很多,损失只个体神经元的输入/输出关系的影响小,因此BP网络具有良好的容错。尽管BP神经网络是最常用的,但它仍然存在一些缺点:(1)学习速度太慢,甚至是一个相对简单的问题,还需要学习数百次,甚至上千次收敛性;(2)并不能保证收敛到全局最小点;(3)网络层隐层数和隐层单元数对的选择没有理论指导,只是根据经验。因此,网络往往有很多的冗余,实际上增加了网络学习时间;(4)学习和记忆没有稳定的网络。[2]BP网络训练结束后,当给它新的内存模式破坏现有的连接能力,导致已记忆的学习方式信息消失。为了避免这种现象,必须是原始的学习模式与新的学习模式训练一起了。
2.2 RBF神经网络
RBF网络有生物背景,符合函数逼近理论,适用于多变量函数逼近,只要选择适当的中心点,可以获得最佳的解决方案,可以使用和线性优化学习算法,同时,培训方法是快速、容易理解,不存在局部最优问题,这是给RBF网络奠定了良好的基础,使其广泛应用于模式识别、函数逼近、信号处理、系统建模和其他领域。 神经网络控制模型设计与仿真研究(3):http://www.youerw.com/zidonghua/lunwen_12854.html