
4.5 本章小结 29
5 总结与展望 30
5.1 总结 30
5.2 展望 30
致谢 32
参考文献 33
1 引言
在现代机械制造加工业中,随着数控技术的发展,步进电机逐渐成为加工生产线上的重要成员,而且也被大部分企业认可并采用[1]。同时,步进电机驱动系统的发展使生产加工方面的精度和效率都有了一定的提高[2]。
1.1 步进电机的发展历史
步进电机是一种数控元件,可以通过数字电路接口相连接和控制,但是数字信号能量太小,必须将信号放大来驱动电机运作,所以必须需要一个与之相匹配的驱动电路发达型号力度提供能量来驱动步进电机[3]。随着电子技术和计算机网络通信技术的迅速发展,步进电机驱动系统部分也在发展,同时在电机研究领域也围绕着步进电机驱动系统设计付出了巨大的努力[4]。本文就是围绕步进电机的驱动系统设计而进行的,采用软件和硬件相结合的一个步进电机驱动系统设计。
1.2 国内外发展现状和趋势
1.3 步进电机驱动系统概述
主要是步进电机和其驱动器两部分构成了步进电机系统。随着制造技术、微电子技术、控制技术的发展,步进电机系统获得了空前的发展,驱动控制技术也越来越先进,在电机使用领域占有重要的地位[7]。
步进电机的运行性能,除了受电机自身性能的决定外,还将受驱动控制器的影响。图1.1描述的是开环驱动控制系统。步进电机伺服系统具备成本低、结构简单、可靠高等优点,不过它也有运行驱动器效率低、速度低、散热性能差等缺点,这样就使得它的使用范围在许多领域也受到限制。因为电机领域的发展和其他控制技术的发展,针对步进电机本身存在的问题,研发出了许多步进电机驱动控制方式,为提高步进电机的驱动器性能提供了发展的空间[8]。
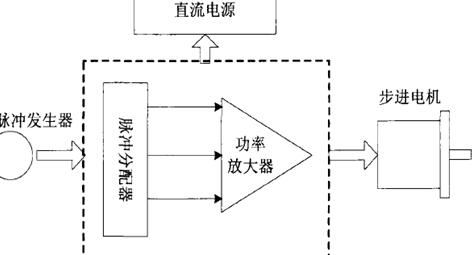
图1.1 驱动控制系统的组成
驱动器的基本结构如图1.2所示,它的组成部分由五级电路构成,当然在不同领域,在特殊的使用环境下的驱动系统将会有特殊的电路组成。
图1.2 驱动器的构成框图
环形分配器是用来接受来自控制器的CP脉冲,接收到脉冲的环形分配器就按顺序状态转换产生所需要的信号,接收到一个脉冲就转化一次信号。由于脉冲不断,就完成了电机的连续运转。在转换的过程中分为正序和反序,这取决于信号转化的方向。
信号放大与处理这一级的原理很简单,就是转化信号的种类并把信号放大和转化即可。
驱动级是用于实现信号数据的转换功能,针对信号进行转化和处理,同时也可以产生抑制、斩波等不同功能的信号。本电路一般连接保护电路,斩波电路,调制电路。
推动级是用于在信号传输的过程中,将较小信号加以放大,大到可以为电机转动提供能量。
保护级的作用是用于保护驱动系统的安全,此系统可以具有自我恢复的功能,而且应该设有应急的电路设置。这一级级电路一般设置针对过压、过热、过流等情况进行保护[9]。
1.4 步进电机驱动系统的发展趋势
混合式步进电机是运用很广泛的一类机电控制元件[10]。步进电机的运行利用驱动器把电脉冲信号转化为步进电机的角位移实现电机的运作的。它可以通过控制脉冲的个数和频率来控制电机的角位移的大小以此来实现步进电机的转向、速度和加速度控制。因此,可以说驱动器的性能决定了步进电机的运动特性,决定了电机的性能。在以前的步进电机驱动器,存在噪音、振荡和丢步的现象,通用性极差[11]。在精确化控制方案中,专用的DSP一直占据主导地位[12]。近年来,随着具有高性价比的ARM芯片的出现,在高速实时处理能力,通用化和人性化的嵌入式软件上具有无可比拟的优势[13]。利用89C52单片机进行单片机的脉冲控制,采用按键和开关的共同控制,经过驱动器完成对步进电机的正反转和加减速功能的实现[14]。 步进电机驱动系统设计(2):http://www.youerw.com/zidonghua/lunwen_21273.html