
第四章对系统进行了数学建模,并利用Matlab搭建了仿真程序,对比了经典PID控制和模糊PID控制的性能。
第五章简要介绍上位机的设计,并分步进行了上位机的软件调试。
最后,总结了本文所做的工作并进行了展望。
2 总体方案简介
本章主要介绍了三轴运动模拟器总体的设计方案。首先介绍了系统的功能和相关性能指标,然后讨论了系统机械结构方案,并给出了系统的结构框图,接着介绍了系统的主要硬件模块,最后介绍了软件方案。
2.1 系统功能和性能指标
运动模拟器作为一种新型的空间运动机构,已在模拟船舶运动、航空航天、训练模拟驾驶等很多方面得到了广泛的应用[9][14-15]。本文设计的三文运动模拟器可以实现三个自由度的空间运动,作为测试导航系统的性能和检测天线的抗负载干扰能力的试验台,它可以模拟载体各轴位置变化和加速度变化。
三轴运动模拟器的技术性能指标如下:
(1) 运动方式:三轴正交
(2) 运动幅度:方位 -150°— +150°
俯仰 -35° — +35°(0°为水平面)
横滚 -35° — +35°(0°为水平面)
(3) 运动速度:每轴最大50°/s
(4) 运动加速度:每轴最大50°/s
(5) 系统精度:每轴<0.2°
(6) 有效载荷重量:最大35Kg
(7) 结构自身重量:不大于75Kg
(8) 载重平台尺寸:50cm*50cm
2.2 系统机械结构的选择
目前,运动模拟器的机械结构按照连接方式来划分,可以分为两大类,串联和并联[10]。
串联式结构是将各杆件经过运动副进行连接的开链式,它的机械结构简单,具有比较大的作业空间和较高的灵活性。但它具有误差累计,惯量大等缺点。和串联式结构相比,并联式结构有着自己的特点:①刚度大,结构稳定,②在相等的体积或者自重的条件下,并联式结构比串联式结构具有较大的承载能力,③串联式结构在位置求解方面正解容易,但是反解非常困难,而并联式结构与此相反,正解比较困难而反解却比较容易[17]。在应用方面串、并联结构之间并不是替代的关系,它们而是互补的关系,并联结构扩大了机器人的新兴应用领域。但在传统领域的应用仍以串联式结构居多。
结合本运动模拟器的应用和串并联结构的优缺点,选择串联结构。因为本运动模拟器主要用于位置正解,且串联式机械结构简单;虽然有累计误差,但可以进行补偿和校正。
2.3 系统组成及总体设计方案
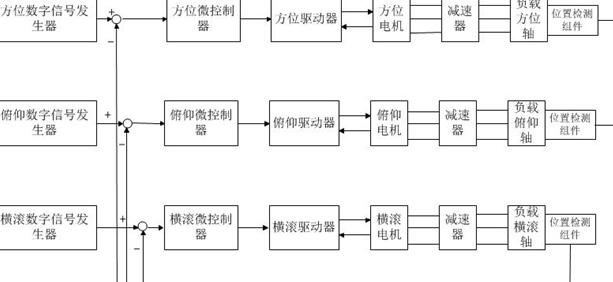
由于电液结构体积庞大且笨重,因此所设计的三文运动模拟器采用机电结构,有三个自由度,包括俯仰、横滚和方位,三个轴是正交垂直的。它的结构采用串联式结构,分为上下两层,上层为俯仰和横滚运动,安装有俯仰、横滚的驱动电机和齿轮减速器;下层为方位运动,安装有方位驱动电机和齿轮减速器;中间由支架进行连接。三个运动轴分别装有位置传感器,即测角传感器。整个机械结构由工厂加工组装而成。
如图2.1所示是三文运动模拟器的系统结构框图。每个轴有以下组成部分:数字信号发生器、微控制器、驱动电机、驱动器、齿轮减速装置和位置检测组件。
 模糊PID控制高精度导航测试系统平台的设计(3):http://www.youerw.com/zidonghua/lunwen_22118.html
模糊PID控制高精度导航测试系统平台的设计(3):http://www.youerw.com/zidonghua/lunwen_22118.html