Matlab汽车防抱死制动系统PID控制的建模与仿真(3)
时间:2018-06-03 15:31 来源:毕业论文 作者:毕业论文 点击:次
1. 4. 1 全电制动系统 目前,控制算法建立在滑移率的基础上时有清晰的指导理论,并且方便完成连续控制,成本问题成为制约其进一步革新的关键。眼下ABS配置的是轮速传感器,但是随着技术进步,车速传感器也是可能的。其具有体积更小、价格便宜以及可靠性高的等特点,这样就不需要计算滑移率,可以直接读出,得到滑移率将变得更具说服力。未来汽车制动控制技术,会加强了汽车制动系统的各项指标,因为其逐渐变成全电技术,或者说是线控化。 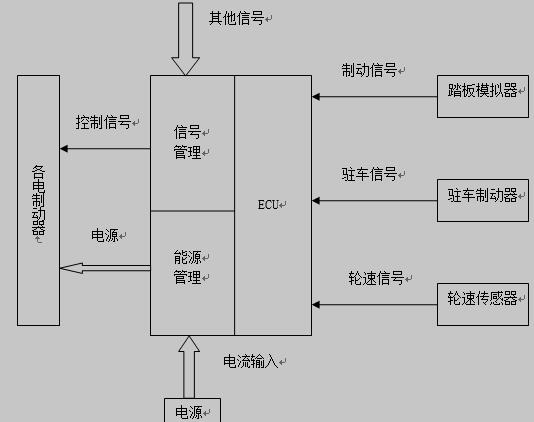 图1.1 全电制动系统图 如图1.1所示,和普通的制动系统有一定的差异,全电制动的传递介质是电力,后者是液体或压缩空气,这样就不需要使用额外的管路及传感器,使得制动时间在一定程度上降低。全电制动系优势有许多方面。第一是与众不同的电动制器,制动管理流程也与众不同的。其次,因为汽车直接利用电力驱动制动器,摈弃了传统制动系统中的液压机构,由中央电控单元(ECU)来控制系统,同时每一个制动器ECU各自控制着制动器。当今,BBW技术变得越来越成熟,已经推出了概念车,由电一液ABS控制系统联合制动。 1. 4. 2 功能集成化系统 当汽车行驶时,ASR的旨在避免车轮发生打滑,ABS的旨在避免车轮抱死。这两个系统都有根据车轮的滑移率,得到一定纵向力与横向力的能力。ASR可以单独工作,也可以和ABS一起使用,组成ABS/ASR系统,称为防滑控制系统。未来的汽车制动系统主要是ABS/ASR与车辆动力控制系统 (VDC)的统一体。当车辆行驶时,抵抗横向干扰,使得横向的运动更加平稳,从而使车辆能够平稳的行驶,车辆也变得更加容易控制。 1. 4. 3 控制算法优化 进一步完善防抱死制动系统,重点是怎样将最优控制理论加入到车辆制动系统中,使得车辆可以取得最好的制动效能。这几年来,现代控制理论发展得非常快,不断创新新的控制方法。下文将详细阐述,这些方法已经被尝试在车辆的制动系中[6] ,它们是一些智能控制理论和非线性控制技术。 1.5 本文研究的内容 1)阐述防抱死制动系统的基本知识,介绍了不同的控制算法,车辆制动仿真时需要用到的不同的模型,重点介绍了PID控制器,以及通过对比证实其优越性。 2)通过在干混凝土路面上,仿真常规制动系统和防抱死制动系统的制动过程,分析曲线后,防抱死制动系统具有良好的制动性能和方向操纵性可以得到验证。 2 ABS的简介 2.1 ABS的基本原理和组成 2. 1. 1 ABS的基本原理 汽车在雨雪天及冻冰打滑的路面上行驶,如遇紧急情况需要急刹车时,就会危险丛生。制动时,轮子如果发生抱死,制动力的大小会发生变化。此外,如果横向力的干扰车轮,横向运动就会出现,非常危险,汽车的制动路程会变长,制动时间也会变长,同时行驶平稳性与转向驾驶能力都会下降。而且,如前文所述,车轮抱死还会使轮胎的出现局部磨损,这样驾驶员在制动操作时会更加地紧张,压力更大[7]。 采用防抱死系统就能够避免车辆行驶过程的一些危险,保障人身的安全。在制动工况时,汽车受到两种阻力的影响: 一种阻力是制动器制动力,它的起因是制动器制动鼓(盘)和摩擦片,由二者之间的摩擦而产生;第二种成为地面附着力,它的起因是轮胎和路面,由二者之间的摩擦而产生。当汽车制动过程中能够保持平稳的行驶,那么制动器制动力小于地面附着力时;相反在制动时,当车轮发生滑移,会出现车轮抱死的现象,此时比起地面附着力,制动器制动力很大。而利用制动管路,ABS能够控制制动管路压力,使其合理的分配在制动分泵上。如此,当汽车急停车时,车轮不会遇到抱死的现象。因此,在紧急刹车的情况下,可以使汽车的方向稳定性依然文持在很高的状态 [8]。 (责任编辑:qin) |