SolidWorks用于噪声测量的两自由度机械臂结构设计(3)
当前,工业机器人作为最典型的机电一体化数字化装备,技术附加值很高,应用范围很
第 2 页 本科毕业设计说明书 广,作为先进制造业和支撑技术和信息化社会的新兴产业,将对未来生产和社会发展起到越 来越重要的作用[5]。
1.2 课题研究意义
随着现代化工业的发展和科技技术的不断提高,大量的机器和电器设备等越来越多地进 入到人们的生活中,工程机器大从挖掘机小到切割机,交通工具如汽车、飞机等,日常电气 如复印打印机、空调等,这些机器在给人们的日常生活和工作带来极大便利的同时,也产生 了极大的噪声污染,长此以往会严重影响人们的身心健康。噪声污染问题愈来愈严重,已成 为当今世界亟待解决的环境污染问题。此外,在工业生产中,机器设备运转时发出的噪声反 映了该设备的振动情况,进而反映出设备质量的优劣。因此,机器设备的运转噪声不仅是工 业污染的重要组成部分之一[6],能对工作环境和劳动工人的身心健康产生巨大的影响,而且 也是工程人员评判机器设备质量好坏的重要标准之一,直接影响到机器的价值和使用价值。 为了降低机器设备的噪声强度、改善工人的工作环境、提高人们的生活质量,噪声测量和控 制技术早在上世纪 50 年代初就引起了研究者的注意,并已成为目前国内外的主要研究内容。
目前常用的噪声测量方法有声强测量法和声全息测量技术。 声强是矢量,定义为为单位时间内通过垂直于声波传播方向的单位面积上的声能量的平
均值,数值上等于单位面积的声功率。声强测量法通过测出包络面内各单元面的声强从而计 算出机器辐射的声功率,使用声强测量法测量噪声时需要移动测量传声器在包络面上进行若 干个离散点的逐点测量或扫描测量。声强测量技术不需要建造特殊的声学环境,可以在普通 环境下或生产现场准确地测定机器设备的声功率[7]。
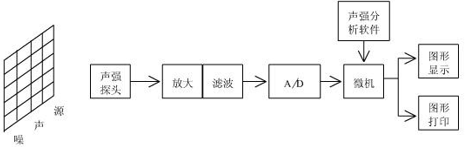
图 1.1 声强测量法识别噪声源
声全息术是将全息照相原理引入声学领域而形成的声成像技术,因为声波与光波的传播 规律相似,都可利用“波阵面重建”原理进行成像。近场声全息测量技术是通过测量声源附 近某一区域的声学量如声压、振速、声强等,来预报其他区域的声特性。近场声全息测量技 术分辨率高,可操作性强,通过在采样面上逐点移动测量传声器来测量得出采样面上的全息 数据[8]。
本科毕业设计说明书 第 3 页
图 1.2 近声场全息技术光路示意图
从以上内容可以看出,不管是通过声强测量还是声全息测量,都需要在包络面或采样面 上移动测量传声器来获取声场信息,从而获得噪声分布状况。而要通过人工手动来反复移动 测量传声器不断校正测点位置,严重浪费人力和时间,效率低下。工业机器人具有不知疲倦、 能准确定位等优点,使用机器人进行噪声的测量能大大解放人力,提高测量效率,本文便是 在此基础上进行机器人的本体——机械臂的分析研究,设计出用于噪声测量的两自由度机械 臂的总体结构。文献综述
1.3 国内外发展现状
经过六十多年的发展,机器人在工业生产活动中得到了越来越多的应用,为提高人类工 作和生活质量做出了重大的贡献。