- 上一篇:基于误差时空特性的高炮武器的射击效能分析
- 下一篇:基于ZigBee网络的路灯监控系统设计+电路图
2 斜巷综合保护系统总体设计
2.1 系统的总体设计方案
2.1.1 系统布置图
本设计是以可编程逻辑控制器PLC为核心的,配上相应的传感器、执行器、人机界面等,分别构建车场出入口数量检测模块、阻车器、挡车栏模块和总体控制模块,并将他们集中管理形成网络,进行全面的监测和控制。同时优化并完善了自动检测功能,能自动控制挡车栏的升降,出现跑车或设备故障时能及时报警并给出信号通知绞车停车。
如下图所示,斜巷总长约500米,共有三个出入口,它们分别是上部平车场、下部平车场和水平车场,在每个出入口都设置有各自数量检测的传感器,用以反映斜巷内的行人数量和小车数量。当小车要运行时,首先应观察斜巷内是否有行人,如果有则通知暂停小车,警报通知巷内行人尽快出巷,待清空斜巷内行人后,小车才能发车。这样就能真正做到斜巷内“行人不行车、行车不行人”,保证斜巷系统的运行安全。
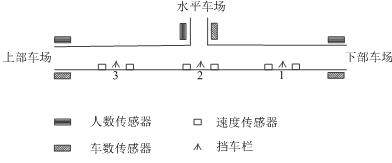
图2-1 主要装置布置图
此外,每隔150米左右在巷内设立柔性挡车栏,并在挡车栏前后20米都安装测速传感器用以测量小车的运行速度。当小车到达挡车栏前部且不超速时,打开挡车栏让小车通过,再当小车经过挡车栏后部位置后,挡车栏自动下放,等待下一次小车的到来。若测得小车超速行驶,则挡车栏始终处于下放状态,保持对小车的拦截状态。
2.1.2 系统功能要求
为了满足对斜巷的综合保护要求,本设计从监测到控制、再到各类报警都进行了不同的规划,具体的功能能描述如下:
(1) 实时监测斜巷内的小车数量和人数并加以显示;
(2) 斜巷内小车数超过5辆时,超挂报警并发出停车信号;
(3) 小车发车前及时清空巷内行人,避免斜巷内车人同行,存在安全隐患;
(4) 小车运行过程中若有行人误入,声光报警并发出停车信号;
(5) 挡车栏自动检测车速并能做出相应的动作;
(6) 挡车栏故障、小车跑车超速及时声光报警,并通知绞车停止运行。
2.2 系统结构框图
整个系统的结构框图如下,由于斜巷距离较长,而一台PLC的控制距离无法满足所有的控制要求,因此设置了多台PLC分别对不同路段进行控制,共4台子模块控制PLC和1台主控PLC。其中由于主控PLC安装在上部车场,故将主控与上部车场模块的PLC共用一个,4台子模块PLC与主控PLC之间均采用RS485进行通信。
图2-2 系统结构框图
下部车场的PLC用来检测斜巷内进出的行人数量和小车数,并将所得数据传输至主控PLC进行总的计算得到当前斜巷内人数和车数。两个挡车栏PLC的作用是相同的的,用于测量小车行驶速度以及检查挡车栏能否上拉或下放到位,是否存在故障,图中的位置信号是挡车栏的状态信号,由挡车栏上部和下部的接近开关检测。
-
PLC双馈式风电系统转矩控制系统设计+梯形图
-
PLC三十万大卡冷水机组电控设计+梯形图
-
PLC加热炉温度监控系统设计
-
PLC变压器升降平台控制系统设计+梯形图
-
PLC柔性制造系统的控制系统设计+梯形图
-
PLC+THBDY-1单容水箱水位控制系统设计+梯形图
-
PLC水箱水位控制系统设计+梯形图
上市公司股权结构对经营绩效的影响研究
现代简约美式风格在室内家装中的运用
巴金《激流三部曲》高觉新的悲剧命运
高警觉工作人群的元情绪...
江苏省某高中学生体质现状的调查研究
g-C3N4光催化剂的制备和光催化性能研究
浅析中国古代宗法制度
C++最短路径算法研究和程序设计
中国传统元素在游戏角色...
NFC协议物理层的软件实现+文献综述