-
17
- 上一篇:51单片机经皮黄疸检测仪的设计+主程序+电路图
- 下一篇:单片机行车在线定位系统设计+仿真电路图
4.3.1 SPI通信 17
4.3.2 AD5752配置及对对电机的控制程序 18
4.4 EQEP及位置反馈 20
结 论 22
致 谢 23
参考文献 24
附录A 电路原理图和PCB图 25
附录B 各模块主程序 26
1 绪论
1.1 背景意义
随动控制系统就是用来对被控对象的某种状态进行控制,使其能够自动、连续、精确复现输入信号变化的规律,要求系统能够精确跟踪控制指令,以实现理想运动控制的过程被称为“伺服控制技术”[1]。
伴通着人们的努力和科学技术的迅猛发展,伺服系统的发展已经经历了从60年代之前的液压伺服系统到60-70年代的有刷直流伺服系统,以及80年代以后的交流伺服系统,在各个阶段,伺服控制技术也随着时代在不断发展,使用的伺服电机及相应的控制技术与伺服系统的发展相关[2]。
伴随着控制理论、微处理器技术以及永磁技术的发展,交流伺服系统得到了广泛的发展与应用,特别是在工业领域,高精度和性能的伺服系统已成为各国竞相奋斗追求的目标,所以交流伺服控制系统具有重要的理论意义和研究价值[3]。
1.2 研究现状
1.3 章节介绍
为方便叙述,本文做如下章节安排:
第一章介绍了伺服随动系统的研究背景及研究意义,国内外的研究现状。
第二章通过对系统的总体设计介绍,首先介绍了系统整个的工作流程,讲述了转台的机械结构和运动方式,以及它与电机的连接关系,同时对控制及伺服驱动部分的总体设计做了简要描述。
第三章介绍系统的硬件总体设计,介绍了电源模块各电源的转换及使用;系统的启动装置,数模转换模块对AD5752芯片作了简要描述以及该芯片的相应电路信息;同时介绍了发射模块,驱动器以及位置反馈模块,并对使用的光电编码器作了相应介绍。
第四章介绍了软件系统的总体设计,先描述了总体程序的结构以及流程,再介绍了系统初始化的配置,包括GPIO初始化配置和中断配置,最后介绍了SPI通信、数模转换程序以及DSP的eQEP模块和电机位置反馈的程序。
2 系统总体设计与实现
当炮弹通过测速模块或穿过靶纸时使系统激活启动,此时DSP控制驱动器驱动电机转动并且计时器开始计时,其中DSP控制相应I/O口输出转动及转动方向信息,通过以SPI通信方式与D/A模块通信,输出相应电压指给出转速信息。当电机控制转台转到正确位置,定时器计时结束后,起爆模块激活,转台发射炮弹。
2.1 转台机械结构
如图2.1所示即为该随动系统转台,通过两个电机控制转台在两个自由度上的运动,底座上的电机控制底盘的旋转运动,上侧的电机控制发射架的俯仰运动。
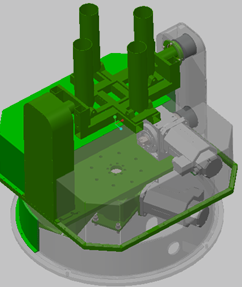
图2.1 转台机械结构三维图
随动系统是让驱动器接受控制芯片DSP所给出的位置速度等信息,从而控制电机驱动转台在俯仰和方位两个方向能够快速、精确地到达所指定的角度位置[6]。
转台的运动包括方位方向和俯仰方向,对两个方向运动是由两套独立的控制系统控制的,两个方向的运动既可以同时进行,也可以独立进行[7]。虽然两个方向的运动相对独立,但实现方式并没有很大不同,区别在于方位运动不受限而俯仰运动受限,受控对象在两个方向上的静阻力矩不同从而引起的执行电机功率、转矩的不同[8]。
-
DSP交流伺服永磁电机驱动...
-
DSP高精度离线数据采集系统设计
-
基于oversim的P2P通信仿真系统设计
-
基于力控组态软件的PLC系...
-
基于SIMATICS7-200的小型锅炉...
-
基于Arduino的自动浇花系统设计+电路图+程序
-
DC-DC基于超级电容的电梯弱电供电系统设计
巴金《激流三部曲》高觉新的悲剧命运
中国传统元素在游戏角色...
江苏省某高中学生体质现状的调查研究
C++最短路径算法研究和程序设计
g-C3N4光催化剂的制备和光催化性能研究
现代简约美式风格在室内家装中的运用
浅析中国古代宗法制度
NFC协议物理层的软件实现+文献综述
上市公司股权结构对经营绩效的影响研究
高警觉工作人群的元情绪...