
附录B 52
1 引言
网络化控制系统通常是指利用通信网络作为信号传输媒介所形成的反馈控制系统[1]。近年来,由于其强大的实际应用背景, 网络化控制系统受到人们的广泛注意。网络化的通信方式给系统的设计和实现带来了很大的方便, 但是和传统的控制系统相比, 网络化的通信方式也给实际系统带来了一些不同和挑战, 例如网络诱导时延,数据包丢失, 外部干扰等[2]。本课题拟对基于网络通信的倒立摆系统展开讨论, 通过对仿真框架的构建、算法的设计与实现,了解系统仿真的一般过程;通过调节仿真中的网络参数,了解参数的变化对系统控制性能的影响,进而思考对现有的制方法如何进行改进。
1.1 网络控制系统概述
网络控制系统NCS(network control system)是一种全分布式、网络化实时反馈控制系统,是指某个区域现场传感器、控制器以及执行器和通信网络的集合,以此提供各控制节点之间的数据传输,实现资源共享和协调操作[3]。网络控制系统摆脱了传统控制方式下点对点的束缚,突破了系统在空间位置上的束缚,拓宽了应用场所,简化系统连接、降低文护成本,广泛应用于各种领域[4]。下图给出了网络控制系统的基本组成:
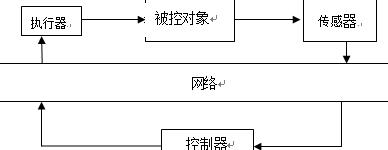
图1.1 网络控制系统的组成
在这种结构下,空间分布的传感器、控制器、执行器的信号被封装在数据包内,通过网络进行传输,极大地实现了资源共享,相比较传统的点对点连接方式,对于系统远程操作和控制是以较小的信息传输成本实现的,设备之间的连接方式降低了系统实际布线成本,减少了文护费用,一定程度上提高了可靠性[5]。
1.2 网络控制系统存在的问题
控制系统是通过网络形成实时闭环控制,虽然实现了资源共享、抗干扰性好的特点。但因其自身的传输机制和节点驱动的选择,网络控制系统中不可避免地存在网络诱导时延、单包多包传输、数据包丢失等问题[6]。
1.2.1 网络诱导时延
在网络控制系统中,多个节点通过一个网络信道实现通信。由于网络带宽有限、数据流量变化不规则,当多个节点在进行数据交换时,常常出现数据碰撞、多路径传输、网络拥塞等现象,因信息交换时间的延迟也就无法避免,这种由网络引起的数据交换时间延迟称为网络诱导时延[7]。网络诱导时延是否随机、恒定抑或有界、不确定,取决于网络类型和通信协议。时延通常会降低系统的性能,使系统的稳定范围变窄,甚至使系统发散不可控制。时延对于NCS的分析和设计来说占有不可忽略的位置[8]。
1.2.2 单包传输和多包传输
在NCS中,数据被封装成占有一定字节的数据包进行传输。单包传输是指NCS中传感器或者控制器发出的数据信息被封装成一个数据包进行传输。多包传输是指NCS中传感器或者控制器发出的数据信息被封装成多个数据包进行传输。网络节点位置或要发送的数据包容量决定了系统采用单包还是多包传输[9]。当节点的位置相距较远或要发送的数据超过控制网络所规定数据包的容量时,为保证数据被准确发送通常选择多包传输。多个数据包传输时,容易使系统产生以下问题:由于节点冲突、网络堵塞、和多路径传输机制,多个数据包不可能同时到达,这将增加接收端数据处理时间,从而导致网络诱导时延增加[10]。系统的分析设计方法通常根据节点采用单包传输还是多包传输而有所不同。 网络化倒立摆仿真平台的构建和控制设计+源程序(2):http://www.youerw.com/zidonghua/lunwen_20623.html